
Page 107 - Vol.35
P. 107
New
Vision
新象新知
連續監控 現場採樣 人力巡檢 AMHS AGV 地震預警
Server server 通知相關單位
MA 酸性物質 MB 酸性物質 進行異常排除
Acid Base 項目
否
HF H 2SO 4 NH 3 圖示
HCI HNO 3 HMP 產線量測 紀錄 數據 是 資料
HBr HMDS
tsmc
H 3PO 4 (TOC/CxF/溫濕度) 資料 正常 建檔
intranet
Not Classi ed AMHS parts 廠務AMC 通知相關單位
H 2O 2 / O 3 勝 AGV 量測AGV 進行異常排除
IPA Acetone
否
資料產出時間 短 長 短 是
AMC 定點採樣 實驗室 資料 分析
MC 凝結性物質 MD 摻加物質 O ine量測 (NH 3/TS/B/P) 分析 建檔 正常 END
Condensables Dopants 人力需求 無 有 有
DOP DBP DEP B 2H 5 BF 3 AsH 3 測量方式 定點 隨機 隨機
Siloxanes BHT TCEP TEP TPP 異常原因
維護成本 高 無 無 圖3、AGV派車系統無線通訊架構 排除
否
圖1、常見連續監控儀器可測量 表1、目前AMC監控機制優缺點比較 進料檢驗 數據 是 貼認證標籤
的微污染物質 精準任務。由近期文獻也可以 (TOC) 正常
[4]
得知 隨著工業4.0的提倡,業
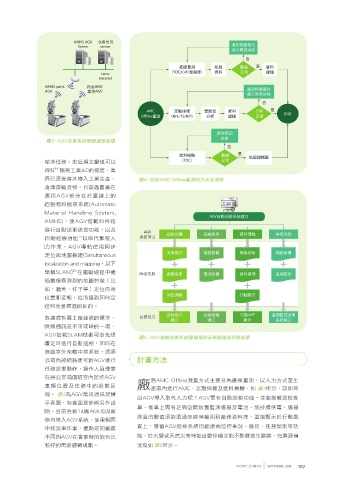
界已逐漸將其導入工業生產、 圖4、目前AMC Offline量測的方式及流程
處於運轉狀態的半導體廠內的
In-line Off-line 倉庫運輸貨物。目前晶圓廠在
人力負荷較大,故若以能以自
動巡檢取代人力將使AMC的 量測項目 應用AGV部分在於產線上的
監控更臻於完美。 自動物料搬運系統(Automatic
AMC SCADA: NH 3 、TS、HCL、TOC(IPA、Acetone、 Routine巡檢量測及採樣(NH 3 、TS、TOC)
CxF...等) 異常位置:NH 3 、TS、TOC(IPA、 Material Handling System, AGV自動巡檢系統建立
常見人力巡檢儀器 CHAD- GC/MS: VOC、IPA、Acetone、CxF...等 Acetone、CxF...等) AMHS),使AGV搭載料件箱
DCS: 溫濕度 異常位置:Particle、溫濕度
進行自動派車送貨功能,以及
在人力巡檢最常見的為應 AGV 巡檢地圖 巡檢推車 資料傳輸 中控系統
[5]
用光離子化檢驗法 [2] (Photo 表2、無塵室內溫溼度與微污染物於In-line/Off-line 的規劃 自動巡檢功能 以取代繁複人 建置項目
Ionization Detector,以下簡稱 力作業。AGV導航使用同步
派車模式 儀器搭載 無線技術 網路架構
PID),利用大多數氣體皆有其 測量離子電流 定位與地圖構建(Simultaneous
100.0ppm 並產生訊號
獨特的離子化能量(Ionization localization and mapping,以下
轉換成濃度讀數
[6]
Potential,以下簡稱IP),單位 簡稱SLAM) 在運動過程中通 障礙克服 避障會車 電池容量 資料處理 遠端監控
為Electron Volts (eV),當外 過重複觀測到的地圖特徵(比
界提供大於氣體IP能量時,該 如,牆角、柱子等)定位自身
氣體便會離子化(原理如 圖2 待測氣體 氣體 帶電價離子 氣體離子重新 位置和姿態,從而達到同時定 消防連動 行動顯示
所示)。PID優點為輕便、迅速 進入儀器 離子化 進入sensor電極 結合成氣體分子 位和地圖構建的目的。
並流出儀器
反應,可即時判斷環境是否有 因而產生電流 巡檢模式 巡檢物種 行動APP 遠端監控派車
為達成智慧工廠建構的標準, 目標成果
揮發性有機物(Volatile Organic 氣體通過 建立 建立 顯示 系統建立
UV燈泡 無線通訊是不可或缺的一環,
Compounds,以下簡稱VOCs)
微汙染物,缺點是對VOCs無 AGV搭載SLAM技術可事先規 圖5、AGV自動巡檢系統建構項目及預期達成目標成果
圖2、光離子化檢驗法(PID)偵測原理
法有效分辨物種,需透過更精 畫定時進行自動巡檢,同時在
密的儀器來判斷。 無塵室外架構中控系統,透過
總和以上常用儀器,若能結合在AGV自動巡檢推車上,便能立即強 公司內部網路便可對AGV進行 計畫方法
另外還有碳氟化合物 (Perfluo-
化無塵室內微汙染物的監控。 任務派車動作,操作人員僅需
rocarbons,PFCs)等微汙染
在辦公室或值班室內監控AGV
物,其分子式為CxF,該物種 務AMC Offline測量方式主要分為產線量測,以人力方式至生
車輛位置及任務中的狀態回 廠
來源為冷媒,於蝕刻後段製程 AGV自動搬運車的功能應用 產區內進行AMC、定點採樣及進料檢驗,如 圖4所示,該如何
報。 圖3為AGV無訊通訊架構
區附屬機台內使用,廠務端採 以AGV導入取代人力呢?AGV需有自動巡檢功能,並能搭載巡檢推
隨著自動化的高度需求,AGV的開發已行之有年,導入自動搬運車
用儀器PICARRO進行偵測, 示意圖,在後面章節將另外說 車,推車上需有足夠空間放置監測儀器及電池,能持續供電,儀器
採用光腔衰盪光譜 [3] (Cavity (AGV) 採用自動或人工方式裝載貨物,按既定路線自動行駛至指定 明。目前台積14廠AMHS與廠
地點,再以自動或人工方式裝卸貨物的工業車輛,不僅能解決日益勞 測量的數值須能透過無線傳輸回到廠務資料庫,並能顯示於行動裝
Ringdown Spectroscopy),可 務均導入AGV系統,使用相同
將採樣氣體可迅速反應當下測 力缺乏的問題,更能提高生產系統的效率與彈性。近年來電腦硬體技 中控派車作業,優點是同廠區 置上,整個AGV巡檢系統均能遠端監控車況、路徑、任務類別等功
值為其優點,因體積大及過重 術、自動控制技術、感測器技術以及軟體開發環境的不斷發展,導航 不同的AGV在會車時的能有比 能,於火警或天然災害時能自動停機並能不影響逃生動線,完整建構
不方便人員移動為問題所在。 準確性大大提升,如今AGV可透過磁條、視覺導航或雷射導航進行 較好的閃避邏輯規劃。 流程如 圖5所示。
106 FACILITY JOURNAL SEPTEMBER 2019 107