
Page 109 - Vol.35
P. 109
New
Vision
新象新知
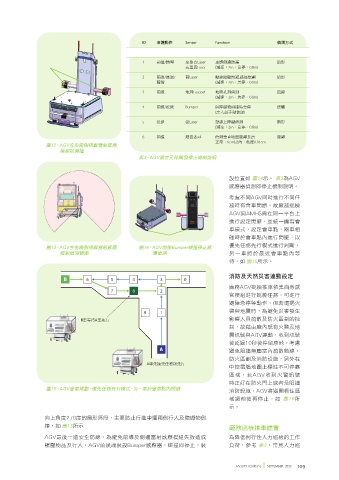
ID 車體動作 Sensor Function 偵測方式
F14P4 F14P3
LIT LIT
A 1 前進/轉彎 左垂直Laser 車體側邊防護 扇形
右垂直Laser (減速:2m,急停:0.8m)
B
2 前進/後退/ 前Laser 動線障礙閃避,路徑規劃 扇形
1 2 3 轉彎 (減速:2m,急停:0.8m)
Station C 路徑由點位串接而成,每點可設定
回報位置&讀值 3 前進 地洞Laser×4 地面孔洞偵測 直線
(減速:2m,急停:0.8m)
4 前進/後退 Bumper 與障礙物碰撞時急停 接觸
圖6、AGV派車路線設定模式主走道巡檢 圖7、AGV前後避障雷射感官模組 (需人員手動復歸)
5 後退 後Laser 動線上障礙偵測 扇形
(減速:2m,急停:0.8m)
Laser detection area 6 前進 超音波×4 偵測垂直地面距離長度 距離
正常:6cm以內,精度0.01cm
障礙物 Decelerate movement 圖12、AGV左右兩側搭載雷射感應
模組防側撞
Stop movement 表3、AGV感官元件觸發停止機制說明
設位置如 圖14示。 表3為AGV
感應器偵測即停止機制說明。
考慮不同AGV同時進行不同任
AGV可走行區域
務時有會車問題,故廠務巡檢
圖8、AGV避障走行模式 圖9、AGV前導雷射感官模組偵測障 AGV與AMHS需在同一平台上
礙物範圍及動作 進行設定閃避,並統一編寫會
車模式,設定會車點,兩車相
碰時於會車點內進行閃避,以
AGV巡檢地圖 優先任務先行模式進行判斷,
Bumper 圖13、AGV左右兩側搭載雷射感應 圖14、AGV前後Bumper碰撞停止感
模組偵測範圍 應偵測 另一車將於最近會車點內等
派車模式
待,如 圖15所示。
AGV以SLAM技術建構無塵室
內地圖,在分割區段的地圖內 消防及天然災害連動設定
B 6 5 4 3 0
將其聯接,路徑由點位串接而
廠務AGV巡檢推車依靠自身感
成,每點可設定回報位置及讀 7 8 2
官模組進行巡檢任務,可進行
值,如 圖6所示。目前規劃行
0.3m~1.5m 避障急停等動作,但若遭遇火
進路線有三種,其一為主走道
巡檢:沿著無塵室主要走道進 9 1 警與地震時,為避免災害發生
圖10、AGV雷射地洞偵測模式 圖11、AGV超音波地 B車等待A車先行 影響人員疏散及防火區劃的控
行區域巡檢,其二可設定AGV 洞偵測模式
制,故藉由廠內既有火警及地
進入某區域Bay位內巡檢,其
震訊號與AGV連動,收到訊號
三為自訂模式,可依據需求置
不同區域的bay內進行巡檢。 避障會車 後延遲10秒後停留原地。考慮
A 避免阻擋無塵室內疏散動線、
AGV靠著自身裝載感官元件進 AGV前後設置雷射感官模組進行感應,如 圖7所示。主要用於行進無
行前進與避障,在進行不同巡 塵室內主走道時,避免與往來行人與車輛,另外主走道較為寬敞,藉 A車先接受任務則先行 防火區劃及消防設施,另外在
中控電腦地圖上標註不可停靠
檢任務時啟用的設定不同。說 由前後雷射感官模組可進行自動偵測閃避,如 圖8所示,進行避障走 區域,若AGV收到火警訊號
明如下: 行。AGV與前方障礙物距離不同將觸發減速或停止,如 圖9所示。 時正好在防火門上或者是阻擋
▂ 沿著無塵室主要走道進行 圖15、AGV會車規劃,優先任務先行模式,另一車於會車點內閃避
AGV前端裝設4顆地洞雷射感測器,用於偵測行進路線上的高架地板 消防設施,AGV將避開標註區
區域巡檢,A/B路線 域網前後再停止,如 圖16所
▂ Bay位巡檢:AGV進bay內 是否有開孔,可隨需求設定0.3m~1.5m不等距離,預警前方路況,
避免AGV墜落。如 圖10所示。無塵室內行進動線廣設三合一透明蓋 示。
巡檢,以區域分隔進行,
板,AGV行經時易造成紅外線感測器誤判而停止,故搭配超音波偵 向上角度270度的扇形區段,主要防止行進中遭兩側行人及障礙物側
如設定P4 LIT區
▂ 自訂巡檢:根據值班需求 測模組,測量垂直段離地面距離是否過長,協助確認地面是否有開 撞,如 圖13所示 廠務巡檢推車建置
孔。如 圖11所示。
進行指定路線巡檢,如設 AGV最後一道安全防線,為避免前導及側邊雷射感應模組失效造成 為降低例行性人力巡檢的工作
定A點→B點→C點 左右兩端亦裝設雷射偵測模組,裝設位置如 圖12所示。偵測範圍為 輾壓物品及行人,AGV前後端裝設Bumper感應器,碰撞即停止,裝 負荷,參考 表2,常見人力巡
108 FACILITY JOURNAL SEPTEMBER 2019 109