
Page 97 - Vol.47
P. 97
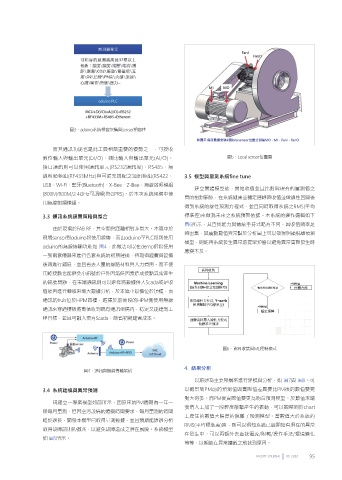
圖3、aduino系統相容架構與sensor相容性
而其通訊功能也是此工具相當重要的優勢之一,可接收
數位輸入與輸出單元(DI/O)、類比輸入與輸出單元(AI/O)。 圖5、Local sensor位置圖
接口通訊則可以使用通訊單元(RS232通訊埠)、RS485、無
線射頻模組(RF433MHz)與可擴充搭配之通訊模組(RS422、 3.5 模型與量測系統fine tune
USB、Wi-Fi、藍牙(Bluetooth)、X-Bee、Z-Bee、無線射頻模組
建立實體模型後,開始收值並且比對與現有的量測值之
(800M/900M/2.4GHz可調頻)與GPRS)。於本次系統架構中使
間的相對關係,在系統健康並穩定運轉時收值並做線性回歸後
用無線射頻模組。
得到系統的線性預測方程式,並且同時取得系統之RMS(平均
3.3 通訊系統建置策略與整合 標準差)來做為未來之系統預警依據。本系統的運作邏輯如下
圖6所示,其查找能力與傳統手持式略有不同,因收值頻率足
由於現場於FAB RF,其空間與距離相對非常大。本篇中於
夠密集,其震動數值異常點於分析圖上可以發現明顯脫離預測
現場sensor到αduino段使用線傳,而由αduino至PLC段則使用
模型,則能再系統發生異常前提早預警以避免異常實際發生時
αduino的無線傳輸功能如 圖4,此做法可以在demo階段使用
應變不及。
一到兩套儀器來進行各套系統的初期建模,待取得經費與設備
後再進行鋪展,並且省去大量的線路材料與人力費用。而不使
用乾接點也能避免小訊號於戶外因氣候因素造成接點異常產生
的訊號問題,在末端通訊則可以選擇將數據併入Scada或是收
值後再進行轉換來做大數據分析,於本篇中設備位於頂樓,而
通訊的hub位於HPM四樓,選擇於前後段的HPM側使用無線
通訊來穿過樓板將數值收到既有通訊架構內,穩定又能達到工
程目標,並且可融入現有Scada,節省初期建置成本。
圖6、資料收集與ML運轉模式
4. 結果分析
圖4、通訊與無線傳輸架構
以前述為主要架構來進行建模與分析,如 圖7與 圖8。可
3.4 系統建模與異常預測 以觀察到PM前的預測值與實際值差異要比PM後的數值要晃
動大得多。而PM後實際值要更為吻合預測模型。於數值末端
現建立一專案模型如前所示,因原來的PM週期為一年一
我們人工加了一段輕度敲擊產生的振動,可以觀察到於chart
保每月量測,但因空污設備的應變時間要求,每月量測的時間
上產生的數值大幅度的脫離了預測模型。當數值大於系統的
略於過長,開發本模型已取得量測數據,並且預期能透過分析
RMS(平均標準差)時,則可以得知系統已經開始有潛在的異常
取得故障前期的徵兆,以避免故障造成之潛在風險。系統模型
在發生中。可以再額外去查找電流/附載/操作手法/環境變化
如 圖5所示。
等等,以期能在異常擴散之前找到原因。
FACILITY JOURNAL 09 2022 95