
Page 77 - Vol.17
P. 77
STROBO SC OPE 與
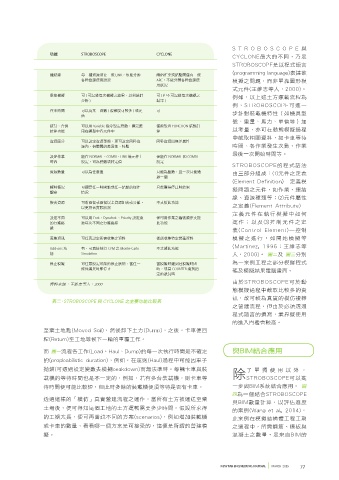
功能 STROBOSCOPE CYCLONE
CYCLONE最大的不同,乃是
STROBOSCOPE是以程式語言
(programming language)表達欲
連結線 每一種資源須要一條 LINK,故能分辨 兩個作業或結點間僅有一條
各種資源使用狀況 ARC,不能分辨各種資源使 模擬之問題,而非單靠圖形模
用狀況
式元件(王維志等人,2000)。
重複模擬 可 ( 可記錄每次模擬之結果,以利統計 可 ( 但不可記錄每次模擬之 例如,以上述土方運載流程為
分析 ) 結果 )
例,STROBOSCOPE可進一
作業時間 可以為某一函數 ( 複雜度可較多 ) 或定 可
值 步針對裝載機特性(如機具型
號、重量、馬力、單價等)加
統計、合併 可以用 Variable 指令設定變數,廣泛應 僅能設置 FUNCTION 結點計
計算功能 用在模型中各元件中 算 以考量,亦可在動態模擬過程
中截取相關資料,如卡車等待
資源區分 可以設定資源型態,更可設定同種資 同種資源間無差異性
源內,個體間的差異性、特點 時間、各作業發生次數、作業
最後一次開始時間等。
設定作業 能在 NORMAL、COMBI、LINK 等元件上 僅能在 NORMAL 和 COMBI
時間 設定,可為變數或特定值 設定
STROBOSCOPE的程式語法
資源數量 可以為任意值 只能為整數,且一次只能通 由三部分組成:⑴元件之定義
過一個
(Element Definition)─定義模
瞬時情況 可觀察任一時間點或任一結點的運作 只能獲得停止時結果
觀察 情況 擬問題之元件,如作業、連結
線、資源種類等;⑵元件屬性
複合資源 可將兩者或兩者以上資源組合或分離, 不支援此功能
以更符合實際狀況 之定義(Element Attribute)─
定 義 元 件 在 執 行 模 擬 中 如 何
設定不同 可以用 Fork、Dynafork 、Priority 設定資 僅可用作業之編號順序支援
的行進路 源每次不同之行進路線 此功能 運 作 ; 以 及 ⑶ 控 制 元 件 之 定
線
義(Control Element)─控制
蒐集資訊 可任意設定所需收集之資料 僅能收集特定幾種資料 模 擬 之 進 行 , 如 開 始 模 擬 等
(Martinez, 1996;王維志等
Add-ons 功 有,可直接執行 CPM 之 Monte-Carlo 不支援此功能
能 Simulation 人,2000)。 圖二及 圖三分別
停止模擬 可任意設定可能的停止狀態,當任一 當模擬時鐘到達模擬時間 為一案例工程之部分模擬程式
條件滿足時即停止 時,或當 COUNTER 達到指 碼及模擬結果電腦畫面。
定的狀況時
由於STROBOSCOPE可於動
資料來源:王維志等人,2000
態模擬過程中截取比較多的資
訊,故可較為真實的模仿複雜
表二、STROBOSCOPE 與 CYCLONE 之主要功能比較表
之營建流程,但由於必須透過
程式語言的撰寫,業界擬使用
的進入門檻會較高。
至棄土地點(Moved Soil),然後卸下土方(Dump),之後,卡車便回
程(Return)至工地等候下一輪的重覆工作。
而 圖一流程各工作(Load、Haul、Dump)的每一次執行時間是不確定 與BIM結合應用
的(propbabilistic duration),例如,在運送(Haul)過程中可能因車子
拋錨(可透過設定變數去模擬beakdown)而無法準時。每輛卡車與裝 除 了單獨使用以外,
載機的等待時間也是不一定的,例如,若有多台裝載機,則卡車等 STROBOSCOPE可以進
待時間便可能比較短,但此時多餘的裝載機便須等待是否有卡車。 一步與BIM系統結合應用。 圖
四為一個結合STROBOSCOPE
透過這樣的「模仿」真實營建流程之運作,當所有土方被運送至棄
與BIM數量計算,以評估進度
土場後,便可得知這個工地的土方運載需要多少時間。假設所求得
的案例(Wang et al., 2014),
的工期太長,便可再嘗試不同的方案(scenarios),例如增加裝載機 此案例在模擬結構體工程工期
或卡車的數量,看看哪一個方案是可接受的,這便是所謂的營建模 之過程中,所需鋼筋、模板與
擬。 混凝土之數量,是來自BIM的
NEW FAB ENGINEERING JOURNAL MARCH 2015 77