
Page 90 - Vol.29
P. 90
New
Vision
新象新知
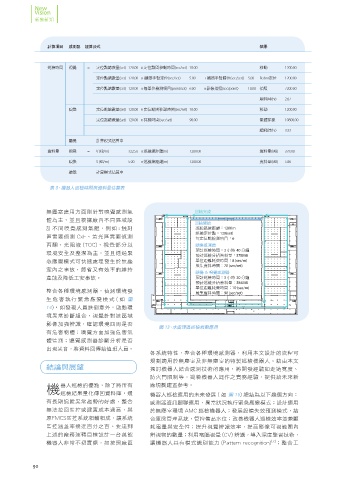
計算項目 感測器 運算公式 結果
巡檢時間 視覺 = 定位點總數量(set) 120.00 × 定位點間移動時間(sec/set) 10.00 移動 1200.00
定位點總數量(set) 120.00 × (機器手臂定位(sec/set) 5.00 + 機器手臂歸位(sec/set)) 5.00 Robot定位 1200.00
定位點總數量(set) 120.00 × 每單位檢測項目(point/set) 6.00 × 影像拍照(sec/point) 10.00 拍照 7200.00
總耗時(hr) 2.67
嗅覺 = 定位點總數量(set) 120.00 × 定位點間移動時間(sec/set) 10.00 移動 1200.00
定位點總數量(set) 120.00 × 採樣時間(sec/set) 90.00 氣體採樣 10800.00
總耗時(hr) 3.33
聽覺 計算模式估算中
資料量 視覺 = V (KB/m) 322.56 × 巡檢總距離(m) 1200.00 資料量(MB) 378.00
嗅覺 = S (KB/m) 5.00 × 巡檢總距離(m) 1200.00 資料量(MB) 5.86
聽覺 計算模式估算中
表 8、機器人巡檢時間與資料量估算表
無塵室應用方面則針對嗅覺感測氣 巡檢完成
體為主,並且根據廠內不同區域設
巡檢開始
計不同嗅覺感測氣體,例如 : 蝕刻 巡檢路線距離:1200m
巡檢定位點:120(set)
區需要偵測 CxF、黃光區需要偵測 每定位點檢測項目:6
丙酮、光阻液 (TOC),視覺部分以 視覺感測器
預計巡檢時間:2 小時 40 分鐘
環境安全及整潔為主,並且透過緊 預計巡檢分析資料量:378MB
急應變模式可快速處理發生於無塵 單位距離耗費時間:8 (sec/m)
蒐集資料時間:70 (sec/set)
室內之事故,節省又有效率的維持
視覺 & 嗅覺感測器
產能及降低工安事故。 預計巡檢時間:3 小時 20 分鐘
預計巡檢分析資料量:384MB
單位距離耗費時間:10 (sec/m)
整合各種環境感測器,偵測環境發 蒐集資料時間:90 (sec/set)
生危害執行緊急應變模式 ( 如 圖
14),如發現人員跌倒意外,啟動環
境異常診斷組合,視覺針對該區域
影像加強辨識,確認環境四周是否
圖 13、水處理區巡檢規劃應用
有危害物體;嗅覺方面加強危害氣
體監測;聽覺感測器診斷分析是否
出現異音,將資料回傳給值班人員。
各系統特性,整合各種環境感測器,利用本文設計的流程可
規劃適用於無塵室及非無塵室的特製巡檢機器人。藉由本文
結論與展望 探討機器人結合感測技術的應用,將開發經驗如走道寬度、
防火門限制等,巡檢機器人運作之實務經驗,提供給未來新
機 器人巡檢的優點,除了將所有 廠規劃建置參考。
巡檢結果量化傳回資料庫,還
機器人巡檢應用的未來發展 ( 如 圖 15) 總結為以下幾個方向:
有長期追蹤異常趨勢的好處,整合 感測器資訊關聯應用,異常狀況執行緊急應變模式;設計適用
無法拉回監控或建置成本過高,與 於無塵室環境 AMC 巡檢機器人;發展設備失效預測模式,結
原FMCS監控系統相輔相成,讓系統 合庫房管理系統,管控備品水位;改善機器人巡檢效率並兼顧
監控涵蓋率接近百分之百。要達到 耗電量與安全性;提升視覺辨識效率,提高影像可視範圍內
上述的廠務運轉目標設計一台萬能 辨視物的數量;利用電腦視覺 (CV) 辨識,導入深度學習技術,
[7]
機器人非常不切實際,如按照廠區 讓機器人具有模式識別能力 (Pattern recognition) ;整合工
90