
Page 89 - Vol.29
P. 89
200m×100m 區 域,200 個 定 位 點
且每個定位點拍攝 6 張相片,機器人
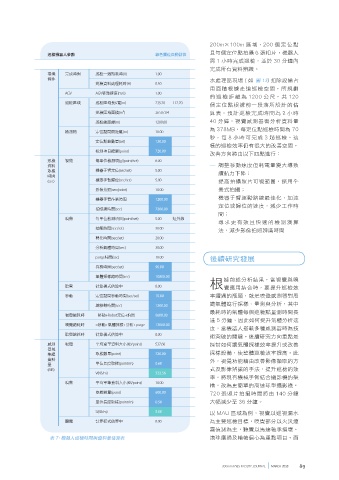
巡檢機器人參數 綠色攔位自動計算
需 1 小時完成巡檢,並於 30 分鐘內
完成所有資料辨識。
環境 完成時間 巡檢一週期耗時(H) 1.00
條件 水處理區現場 ( 如 圖 13) 扣除設備占
巡檢資料處理耗時(H) 0.50
用面積根據走道巡檢空間,所規劃
AGV AGV移動速度(m/s) 1.00
的 巡 檢 距 離 為 1200 公 尺, 共 120
巡檢區域 巡檢區域長&寬(m) 235.20 112.70 個定位點根據前一段落所設計的估
巡檢區域面積(m²) 26507.04 算表,預計巡檢完成時間為 2 小時
巡檢總距離(m) 1200.00 40 分鐘,視覺感測器需分析資料量
為 378MB,每定位點巡檢時間為 70
檢測物 定位點間隔距離(m) 10.00
秒,每 8 小時可完成 3 趟巡檢。這
定位點總數量(set) 120.00
樣的巡檢效率仍有很大的改善空間,
檢測項目總量(point) 720.00
改善方向將由以下四點進行:
巡檢 視覺 每單位檢測項目(point/set) 6.00
資料 ─ 調整移動速度但耗電量變大導致
取樣 機器手臂定位(sec/set) 5.00 續航力下降;
時間
(sec) 機器手臂歸位(sec/set) 5.00 ─ 提高拍攝照片可視範圍,採用全
影像拍照(sec/point) 10.00 景式拍攝;
機器手臂作業時間 1200.00 ─ 機器手臂運動路線最佳化,加速
定位或歸位的速度,減少工作時
拍照總時間(sec) 7200.00
間;
嗅覺 每單位檢測項目(point/set) 5.00 紅外線
─ 尋求更有效且快速的檢測演算
抽氣時間(sec/set) 30.00
法,減少影像拍照辨識時間
轉化時間(sec/set) 20.00
分析氣體時間(sec) 30.00
purge時間(sec) 10.00 後續研究發展
採樣時間(sec/set) 90.00
氣體採樣總時間(sec) 10800.00
根 據前述分析結果,當視覺與嗅
聽覺 計算模式估算中 0.00 覺應用結合時,要提升巡檢效
移動 定位點間移動時間(sec/set) 10.00 率遭遇的瓶頸,就是嗅覺感測器對周
總移動時間(sec) 1200.00 遭氣體進行採樣、量測與分析,其中
最耗時的氣體每個巡檢點量測時間長
視覺總耗時 =移動+Robot定位+拍照 9600.00
達 5 分鐘,因此如何提升氣體分析速
嗅覺總耗時 =移動+氣體採樣+分析+purge 12000.00
度,當機器人搭載多種感測器時為技
聽覺總耗時 計算模式估算中 0.00
術突破的關鍵。後續研究方向重點是
感測 視覺 平均單筆資料大小(KB/point) 537.60 探討如何讓氣體採樣效率提升或改善
器蒐
集總 取樣數量(point) 720.00 採樣設備,使整體巡檢效率提高。此
資料 外,視覺功能藉由改善影像擷取的方
量 單位長度取樣(point/m) 0.60
(MB) 式及影像辨識的手法,提升巡檢的效
V(KB/m) 322.56
率,將現有機械手臂結合攝影機的架
嗅覺 平均單筆資料大小(KB/point) 10.00
構,改為更簡單的高速球型攝影機,
取樣數量(point) 600.00 720 張照片拍攝時間將由 140 分鐘
單位長度取樣(point/m) 0.50 大幅減少至 36 分鐘。
S(KB/m) 5.00 以 MAU 區域為例,視覺以巡視漏水
聽覺 計算模式估算中 0.00 為主要巡檢目標,嗅覺部分以火災煙
霧偵測為主,聽覺以馬達軸承損壞、
表 7、機器人巡檢時間與資料量估算表 滾珠磨損及輪軸偏心為重點項目。而
300mm FABS FACILITY JOURNAL MARCH 2018 89