
Page 88 - Vol.29
P. 88
New
Vision
新象新知
量測開始
量測第一點(A)
Y N N
量測下一點 讀值正常? 儀器正常? 通知工程師修復儀器
Y
量測該點後兩點
(B & C)並比較濃度 通知工程師現場異常
Y IS N IS Y IS Y
B > C ? A > B ? A > C ?
B濃度高 N N A濃度高
鎖定B點監測 C濃度高 鎖定A點監測
往後兩點繼續比對
N N
狀況結束? 狀況結束?
Y Y
繼續往下量測 繼續往下量測
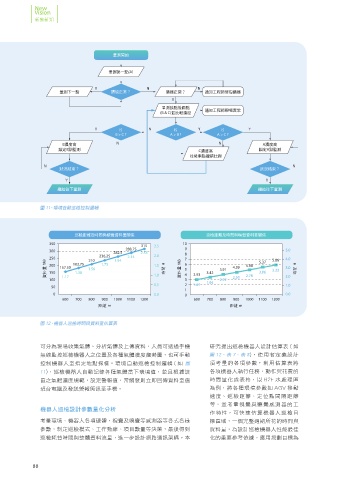
圖 11、環境自動巡檢控制邏輯
巡檢距離及時間與視覺資料量關係 巡檢距離及時間與嗅覺資料量關係
350 315 2.5 10
288.75 9
300 282.5 2.33 8 5.0
250 210 236.25 1.94 2.14 2.0 7 5.37 5.86 4.0
資料量 MB 200 157.50 183.75 1.56 1.75 1.5 時間 H 資料量 MB 6 5 3.42 3.91 4.39 4.88 3.06 3.33 3.0 時間 H
150
1.38
100 1.17 1.0 4 3 2.93 2.22 2.50 2.78 2.0
0.5 2 1.67 1.94 1.0
50
1
0 0.0 0 0.0
600 700 800 900 1000 1100 1200 600 700 800 900 1000 1100 1200
距離 m 距離 m
圖 12、機器人巡檢時間與資料量估算表
可分為現場收集氣體、分析氣體及上傳資料,人員可透過手機 研究提出巡檢機器人設計估算表 ( 如
無線監控巡檢機器人之位置及各種氣體濃度趨勢圖,也可手動 圖 12、表 7、表 8),使用者定義設計
控制機器人至指定地點採樣。環境自動巡檢控制邏輯 ( 如 圖 須考量的各項參數,利用估算表將
11),巡檢機器人自動記錄各種氣體當下環境值,並且根據該 各項機器人執行任務,動作與花費的
區之氣體濃度規範,設定警報值,當觸發則立即回傳資料至值 時間量化成表格,以 B2F 水處理區
班台電腦及發送警報簡訊至手機。 為例,將各種環境參數如 AGV 移動
速度、巡檢距離、定位點間隔距離
等,並考量視覺與聽覺感測器的工
機器人巡檢設計參數量化分析
作特性,可快速估算機器人巡檢目
考量環境、機器人各項硬體、視覺及嗅覺等感測器等各式各樣 標區域,一個完整週期所花的時間與
參數,制定巡檢模式、工作動線、項目數量等決策,最後得到 資料量,為設計巡檢機器人性能最佳
巡檢耗費時間與整體資料流量,進一步設計網路通訊架構。本 化的重要參考依據,應用規劃目標為
88