
Page 10 - Vol.45
P. 10
Tech
Notes
技術專文
2.4 遷移學習(Transfer Learning) 3. 研究方法
傳統機器學習方法,在模型訓練階段處理訓練資料 3.1 MLOps機器學習維運流程(Development and
及在上線應用階段處理測試資料時,往往會有一前提假設 Operations w/Machine Learning)
(assumption) : 「訓練階段及測試階段所採用的資料需來自於
MLOps主要是由機器學習(Machine Learning, ML)及開發
相同的資料分佈(data distribution),並且有著同樣的特徵值特
與維運(Development and Operations, DevOps)兩個資訊領域
性(feature property)」。這個假設雖是令所有機器學習方法得
的衍生字結合而來,簡單來說就是適用於機器學習的DevOps
以基於訓練資料產生模型,再將模型上線應用在測試場域的重
流程。由章節2.3及2.4可知,機器學習應用在開發階段需要有
[04]
要依據 。然而在現實的情況下,這個假設會遇到兩個挑戰。
效率地累積大量訓練資料,在上線應用一段時間後,或是佈署
①在機器學習、深度學習和數據挖掘的大多數任務中,我們都
既有系統到其他場域時,也需要進行維護校準。而為這些必要
會假設training和inference兩個階段,採用的數據皆會服從相
的開發及維護工作,設計標準作業程序並整合到機器學習應用
同的分佈(distribution),資料特徵也都有相似的性質。但在變
整體的生命週期之中,為開發及維運人員提供運營效率及便利
遷快速的現實環境中,這個假設很難長久維繫。例如欲在施工
性,便是把MLOps的精神融入在使用者介面及操作流程上的
進度快速的工地中發展影像辨識應用,地形地貌及環境背景的
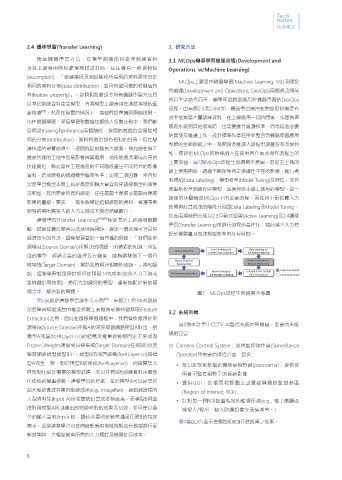
主要效益。圖7為MLOps流程生命週期示意圖。若從左上角的
快速變化,勢必會在工程進度的不同階段產生不同特性的影像
線上偵測開始,透過不斷搜集判定準確性不佳的影像,進行資
資料,造成原有的辨識模型偏差失準;②第二項困難,來自於
料標記(Data Labeling)、模型校準(Model Tuning)及評估,並且
深度學習模型本質上就是高度仰賴大量資料來訓練模型的演算
將重新校準訓練好的模型,替換掉原本線上使用的模型。這一
法類型,其所需要的資料級距,往往是數十萬張或是數百萬張
連串的步驟構成MLOps中的必要流程。而在其中最花費人力
影像的量級,要去一一蒐集與標記這個級距的資料,會讓專案
時間與計算成本的階段分別是Data Labeling及Model Tuning,
開發初期所需投入的人力工時成本變得滯礙難行。
於此兩項我們分別以2.3互動式學習(Active Learning)及2.4遷移
遷移學習(Transfer Learning) [10][20] 便是基於上述兩項困難
學習(Transfer Learning)來進行流程的最佳化,藉此減少人力標
點,試圖在機器學習算法落地應用時,提出一個合理可行且有
記影像數量及加速模型校準的計算時間。
經濟效率的作法。遷移學習基於一個普遍的假設 : 「我們在來
源場域(Source Domain)所解決的問題、所積累的知識、所生
成的模型,經過妥善的處理及存儲後,能夠遞移到下一個目
標場域(Target Domain),幫助我們解決相關的問題。」換句話
說,遷移學習就是探討如何使用最少的成本(包含人力工時或
是機器計算時間),將原先訓練好的模型,重新適配於新的環
境之中,解決新的問題。 圖7、MLOps流程生命週期示意圖
[20]
圖5⒝就是遷移學習運作示意圖 ,章節2.1 圖1中有說明
深度學習模型淺層的權重參數主要做為影像特徵萃取(Feature
3.2 系統架構
Extraction)之用,因此在遷移學習過程中,我們會將應用於來
圖8為本計畫中CCTV AI監控系統的架構圖,重要的系統
源場域(Source Domain)任務A的深度學習網路模型A取出,把
模組包含 :
模型A淺層(for#Layer<n)的結構及權重參數都固定下來成為
Frozen Weights複製到目標場域(Target Domain)任務B的深度 ① Camera Control System : 提供監控操作員(Surveillance
學習網路模型模型B中。模型B的淺層結構(for#Layer<n)與模 Operator)所需要的操控介面,包含 :
型A完全一致,對於模型B的後段(for#Layer≥n),則由開發人 • 每日定期更新攝影機環景視野圖(panorama),提供使
員客制化設計需要的模型結構,並以任務B的訓練資料來最佳 用者可監控視野下的最新影像
化後段的權重參數。遷移學習的好處,在於模型A可以是基於 • 提供GUI,於環景視野圖上設置感興趣的監控熱區
超大型影像資料集的訓練成果(e.g., ImageNet),要訓練這樣的 (Region of Interest, ROI)
大型資料集(Input A)所花費的計算成本相當高,而模型B得直 • 針對每一個ROI設置特定的監視任務(e.g., 電子圍籬區
接取用模型A所訓練出的特徵萃取的成果及功效,並且僅以最 域侵入/侵出、個人防護設備穿戴偵測等。)
少的輸入資料(Input B),調校必要的參數來滿足任務B的特定
圖9為GUI介面示意圖說明ROI任務設置之效果。
需求。透過遷移學習可在開展新應用場域或對既有模型進行重
新效準時,大幅度節省所需的人力標註及機器計算成本。
8