
Page 12 - Vol.45
P. 12
Tech
Notes
技術專文
Detection模組。於此模組中,針對不同影像辨識需求, 4. 實驗分析
有實作多種用途的影像偵測演算法,包含 : 物件偵測、影
於本文撰稿同時,CCTV AI工安監控系統目前可偵測事件
像分割、物件追蹤及人臉身份識別。經運算後輸出多項物
尚在拓展建置中,本章節將以目前可支援的 : ①險區域人員侵
件識別結果,做為下一階段運算的輸入資訊。
入/侵出偵測;②人員防護設備(PPE)穿戴完整性;③人臉影像
⑤ Violation & High Risk Detection : 本模組實做工安管理規
身份辨識進行效能分析。不同實驗項目皆會揭露資料搜集方
則,例如 : 於設定的電子圍籬高風險區域,偵測人員的
式、樣本分佈情形與量化偵測準確性等資訊,供讀者做為評估
侵入/侵出,或是估測吊掛物起吊的高度並偵測人員闖
參考。
入管制區等。這部份會以Deep Learning based Object
Detection偵測出的影像物件做為輸入,著重在演算法邏 4.1 Case-高風險管制區域人員侵入偵測
輯運算,進行工安違規項目或高風險行為的判定。 本實驗主要評估以CCTV AI工安監控系統GUI介面,實作
⑥ Event Management 模組 : 主要接收Violation & High Risk 電子圍籬功能,設置ROI區域作為高風險區域,並偵測高風險
Detection模組所偵測的事件,進行事件的即時告警及事 區域的人員侵入事件。
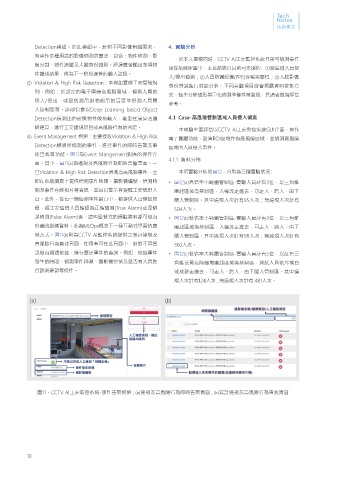
後查找等功能。圖11為Event Mangement對應的操作介
4.1.1 資料分佈
面。其中,圖11⒜為違規及高風險行為即時告警畫面。一
旦Violation & High Risk Detection偵測為高風險事件,立 本項實驗分佈如圖12,分別為三種實驗狀況 :
即在系統網頁上提供偵測事件種類、攝影機編號、偵測時 • 圖12⒜高倍率小範圍管制區-實驗人員計有3位,以三角錐
間及事件存證相片等資訊,並且以警示音提醒工安值班人 圍起區域為禁制區,人輪流走進去,可走入、跨入、由下
員。此外,在每一個偵測事件網頁中,都提供人員確認按 闖入管制區。其中違規人次計有95人次 ; 無違規人次計有
鈕,經工安值班人員確認為正確偵測(True Alarm)或是錯 504人次。
誤偵測(False Alarm)後,這些監督式的標駐資料都可做為 • 圖12⒝低倍率小範圍管制區-實驗人員計有3位,以三角錐
珍貴的訓練資料。此為MLOps概念下一種互動式學習的實 圍起區域為禁制區,人輪流走進去,可走入、跨入、由下
現方式。圖11⒝則為CCTV AI監控系統提供之累計違規及 闖入管制區。其中違規人次計有98人次 ; 無違規人次計有
高風險行為查找頁面,使用者可在此頁面中,針對不同資 360人次。
訊做為過濾依據,進行歷史事件的查詢。例如 : 依據事件 • 圖12⒞低倍率大範圍管制區-實驗人員計有5位,以紅色三
發生的時間、偵測事件種類、攝影機位值及是否有人員進 角錐及黃色隔離墩圍起區域為禁制區,測試人員依序獨自
行誤判確認等條件。 或成群走進去,可走入、跨入、由下闖入管制區。其中違
規人次計有124人次 ; 無違規人次計有 481人次。
圖11、CCTV AI工安監控系統-事件告警模組 ; ⒜違規及高風險行為即時告警頁面 ; ⒝累計違規及高風險行為查找頁面
10