
Page 92 - Vol.40
P. 92
54
55
53
51
52
59
60
58
56
57
67
66
68
70
69
62
61
63
65
64
3.2.6 ASRS系統online狀態下異常無警報
4. 結果與分析
ASRS系統狀態可分3種:①手動÷由人員手動操作 ②
ASRS+DHL系統運轉啟用至今。透過分析DHL運轉
自動÷系統全自動 ③online÷人員介入處理中,需人為下
KPI,找出關鍵警報,如 表2,並逐一克服改善前6大問題
指令,無法全自動運轉。初期人員維護系統時復歸時皆未
,有效的將異常發生率從運轉初期的11.4%降至1%,MTTR
切至正確之自動狀態,故與廠商討論將online狀態改成異
從2.5降至0.21hrs/次,MTBF也從51提升至224hrs,有效提
常狀態,並發出警報,以提醒管理者系統已進入異常處理
升了系統可靠度。
模式。
此外,透過大數據分析,也能看出自動倉儲對於桶裝
化學品進料到退桶所節省的工時,如 表3,自動倉儲不僅
大幅節省了庫房操作員入庫/出庫/領料的動作,從ASRS直
接將桶裝化學品傳輸進入DRU的工作,也讓棧板工作時間
從原本60分鐘大幅降低至只需要花費20分鐘,整體傳輸時
間節省了67%。
75
79
80
78
76
77
71
73
72
74
New
Vision
新象新知
,用以推估水中TOC及COD之濃度。以下將針對吸收光譜 (Accuracy)與精確度(Precision)作為參考指標進行分析,並
影響因子、降低干擾方法驗證結果;以及水樣經稀釋與過 以環檢所公告方法作為驗證標準(NIEA-PA103),準確度:
濾之前處理程序前後所建立的濃度模式驗證結果進行討論 相對誤差<15%,精確度:線性回歸R >0.99。 [7]
2
,探討經前處理程序後是否能將濃度推估模式於驗證上有
更精確的結果。 700 UV
254
TOC(900series)
650
4.1 瓶杯實驗
TOC(ppb) 600
將半導體廠區自來水與放流廢水分別以吸收光譜與傳
統量測方法(詳見 表4)比對TOC及COD濃度,並以不同倍 550
率稀釋水樣後記錄量測數據,圖2為自來水TOC-UV 不同 500
254
1 2 3 4 5 6 7 8 9 10
濃度下關係圖,圖3為放流廢水COD-UV 不同濃度下關
254
係圖,經由線性迴歸,我們可以得到254nm波長吸收光譜
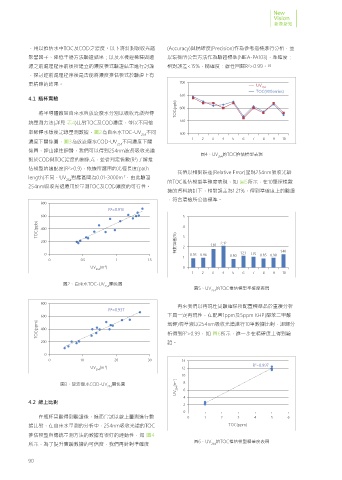
圖4、UV 的TOC推估模型表現
254
2
對於COD與TOC濃度的關係式,並從判定係數(R )了解推
2
估模型的適配度(R >0.9),依據所選用的光徑長度(path
我們以相對誤差(Relative Error)呈現254nm吸收光譜
-1
length)不同,UV 對應區間為0.01-3000m ,由此驗證 的TOC推估模型準確度表現,如 圖5所示,在10筆採樣數
254
254nm吸收光譜應用於量測TOC及COD濃度的可行性。
據的資料統計下,相對誤差為1.21%,得到準確度上的驗證
5. 結論 15P7成功導入了ASRS+DHL模式,改變了半導體廠化 ,符合環檢所公告標準。
800
學品物流運作邏輯,大幅減少了人力輸送所需的時間。目 R =0.913
2
經過一年多的努力,廠務終於建構出ASRS+DHL化學
前各式酸、鹼類化學品已經完全導入此系統,惟有機化學 600 5
品物流新標準。廠務在最先進的N5/N7新廠區藉由收集安
品(solvent) 礙於系統防爆設計規畫及法規檢討尚未完成, 4
裝/試車/運轉,各個階段的使用者經驗,得出許多寶貴的 TOC(ppb) 400
仍需人力搬運上機。未來展望繼續開發防爆型ASRS,期望
智慧結晶。整理如下: 200 3
有朝一日有機化學品也能達成全自動化倉儲。本專案歸功 相對誤差(%) 2 1.81 2.12
① 系統安裝: 於廠區的即時回饋和設計部的快速反應,讓問題迎刃而解 0 1 0.93 0.96 0.80 1.23 1.15 0.85 0.98 1.40
• 與DHL傳輸的RGV馬達傳送速度改為5m/min ,也讓新廠區來得及站在巨人的肩膀上,避免重蹈覆轍。 0 0.5 -1 1 1.5
期許這些經驗傳承,能讓既有廠區降低轉型所需面對的未 UV (m ) 0
254
• DHL與RGV距離增加free roller使距離小於30cm 1 2 3 4 5 6 7 8 9 10
知風險,建立信心開始發展新世代的桶裝化學品高速物流
• 對照式sensor安裝 系統。 圖2、自來水TOC-UV 關係圖 圖5、UV 的TOC推估模型準確度表現
254
254
• 帶狀式leak sensor
800 再來我們以再現性實驗確保所配置標準品於重複分析
• manual port自動門安裝 參考文獻 R =0.937
2
600 下具一定再現性,在配置1ppm及5ppm KHP(鄰苯二甲酸
② 試車階段 : 增加測試棧板種類與數量,及早發現運轉問 [1] 呂明山(2018)。工業4.0時代來臨∶機械工業4.0。科技大觀園 氫鉀)標準液以254nm吸收光譜進行10筆數據比對,迴歸分
。2018年10月1日,取自https://scitechvista.nat.gov.tw/c/s
題,及早調整。 gTm.htm TOC(ppm) 400 析得到R >0.99,如 圖6所示,進一步在精確度上得到驗
2
[2] 自動化立體倉儲的優越性-MBA智库百科,http://wiki.mbal
③ 運轉階段 : 共有6項改善,皆已列入標準設計。 ib.com/zh-tw/自動化立體倉儲的優越性。 3.3 改善分析 200 證。
[3] 智慧物流與倉儲專輯-RFID讓倉儲系統全面透明化,DIGITIMES
• 運轉資訊不足 : 建立運轉KPI 企劃2013。 本研究依據Beer-Lambert吸收光譜原理,利用吸光度 0
0 10 20 30 14
• 定位sensor調整÷提早於試車階段驗證 與有機物濃度呈現良好的線性關係作為推估模式建立之基 UV (m ) 12 R =0.997
2
-1
254
礎。除有機物因素外,其餘影響顯著者則視為本研究量測 10
• 定位sensor誤作動÷增加集光罩
上之干擾因子,進而進行干擾因子的排除與改善驗證。透 圖3、放流廢水COD-UV 關係圖 8
• DRU棧板傳送卡板÷DRU改雙動力滾輪 過兩種水樣前處理方法,分別為稀釋及過濾,驗證前處理 254 UV 254 (m -1 ) 6
• 棧板膠膜干擾÷增設異常警報延時 是否能達到干擾去除或干擾降低之目標。 4.2 線上比對 4 2
• ASRS系統online狀態下異常無警報÷增設異常警報 0
4. 結果與分析 在瓶杯實驗得到驗證後,進而嘗試以線上量測進行數 0 1 2 3 4 5 6
,提醒管理者已進入半自動操作
據比對,在自來水量測的分析中,254nm吸收光譜的TOC TOC(ppm)
本研究嘗試以吸收光譜建立TOC與COD濃度之量測方 推估模型與傳統量測方法的數據有很好的連動性,如 圖4
法,直接採用半導體廠區自來水及放流廢水建立量測數據 所示,為了提升實驗數據的可信度,我們再針對準確度 圖6、UV 的TOC推估模型精確度表現
254
81 82 83 84 85 86 87 88 89 90
91 92 93 94 95 96 97 98 99 100