
Page 29 - Vol.06
P. 29
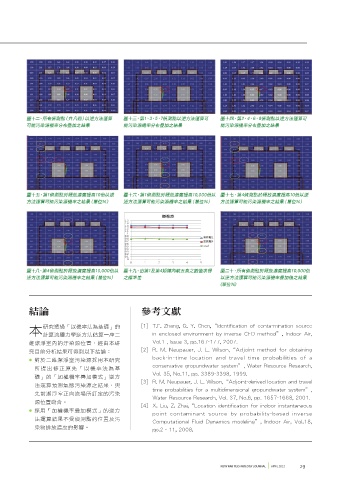
圖十二、所有偵測點(共八個)以逆方法運算 圖十三、第1、3、5、7偵測點以逆方法運算可 圖十四、第2、4、6、8偵測點以逆方法運算可
可能污染源機率分布疊加之結果 能污染源機率分布疊加之結果 能污染源機率分布疊加之結果
圖十五、第1偵測點於釋放濃度提高10倍以逆 圖十六、第1偵測點於釋放濃度提高10,000倍以 圖十七、第4偵測點於釋放濃度提高10倍以逆
方法運算可能污染源機率之結果(單位%) 逆方法運算可能污染源機率之結果(單位%) 方法運算可能污染源機率之結果(單位%)
圖十八、第4偵測點於釋放濃度提高10,000倍以 圖十九、由第1及第4矩陣內前五高之數值求得 圖二十、所有偵測點於釋放濃度提高10,000倍
逆方法運算可能污染源機率之結果(單位%) 之標準差 以逆方法運算可能污染源機率疊加後之結果
(單位%)
結論 參考文獻
本 研究透過「以機率法為基礎」的 [1] T.F. Zhang, Q. Y. Chen,“Identification of conta-mination source
in enclosed environment by inverse CFD method”, Indoor Air,
計算流體力學逆方法估算一座二
維潔淨室內的汙染源位置,經由本研 Vol.1 , Issue 3, pp.167-177, 2007.
究目前分析結果可得到以下結論: [2] R. M. Neupauer, J. L. Wilson,“Adjoint method for obtaining
back-in-time location and travel time probabilities of a
● 對於二維潔淨室污染源採用本研究
conservative gropundwater system”, Water Resource Research,
所提出修正原先「以機率法為基
Vol. 35, No.11, pp. 3389-3398, 1999.
礎」的「加權機率疊加模式」逆方
[3] R. M. Neupauer, J. L. Wilson,“Adjoint-derived location and travel
法運算預測氣態污染源之結果,與
time probabilities for a multidimensional gropundwater system”,
先前潔淨室正向流場所訂定的污染
Water Resource Research, Vol. 37, No.6, pp. 1657-1668, 2001.
源位置吻合。
[4] X. Liu, Z. Zhai,“Location identification for indoor instantaneous
● 採用「加權機率疊加模式」的逆方
point contaminant source by probability-based inverse
法運算結果不受偵測點的位置及污
Computational Fluid Dynamics modeling”, Indoor Air, Vol.18,
染物排放濃度的影響。
pp.2–11, 2008.
NEW FAB TECHNOLOGY JOURNAL APRIL 2012 29