
Page 83 - Vol.29
P. 83
%
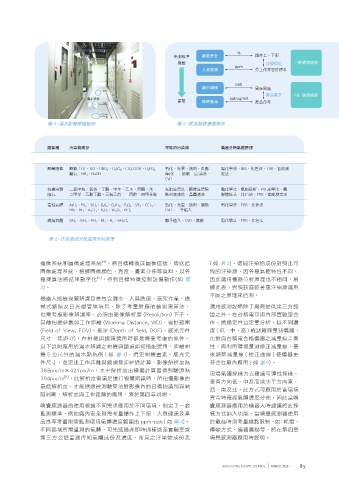
偵測標準 廠區安全 爆炸上、下限
寬鬆 法規規定 一般環境檢測
ppm
人員健康 勞工作業容許標準
ppb
廠內環境 異味問題
7m
產品需求 Fab 環境檢測
漏水辨識 嚴緊 ppt/ug/m3
5m 精密產品 產品良率
2.5m
圖 4、漏水影像辨識範例 圖 5、感測器體濃度需求
廢氣種類 污染物成份 可能的污染源 儀器分析氣體原理
酸鹼廢氣 酸氣:HF、HCl、HNO 3 、H 2 SO 4 、CH 3 COOH、H 3 PO 4 氧化、光罩、蝕刻、反應爐 電化學法、IMS、比色法、FTIR、官能測
鹼氣:NH 3 、NaOH (氧化爐、擴散爐)之清洗、 定法
CVD
有機溶劑 二氯甲烷、氯仿、丁酮、甲苯、乙本、丙酮、苯、 光阻液清洗、顯像液清除 電化學法、氣相層析、PID 光學法、觸
廢氣 二甲苯、乙酸丁酯、三氯乙烷、爐丙醇、四甲基胺 蝕刻液清除、晶圓清洗 媒燃燒式、比色法、FTIR、官能測定法
毒性氣體 AsH 3 、PH 3 、SiH 4 、B 2 H 6 、B 4 H1 0 、P 2 O 5 、SiF 4 、CC1 4 、 氧化、光罩、蝕刻、擴散 電化學法、FTIR、比色法
HBr、BF 3 、A 1 C1 3 、B 2 O 5 、As 2 O 3 、BCl 3 CVD、爐子植入
燃燒氣體 SiH 4 、AsH 3 、PH 3 、BF 3 、H 2 、SiH 2 Cl 2 離子植入、CVD、擴散 電化學法、FTIR、比色法
表 2、汙染源成分及選用分析原理
[4]
攝像系統和圖像處理系統 。將目標轉換成圖像信號,傳送給 (如 表 2),透過汙染物成份對照出可
圖像處理系統,根據圖像顏色、亮度、畫素分佈等資料,以各 能的汙染源,因各種氣體特性不同,
[5]
種演算法將結果數字化 ,得到目標特徵控制設備動作(如 圖 因此選用儀器分析原理也不相同,根
3)。 據此表,對照該區較著重汙染源選用
不同之原理來偵測。
機器人巡檢視覺辨識目標包含漏水、人員跌倒、高架作業、機
械式錶頭及日光燈管等項目,除了考量對應的檢測演算法, 選用感測設備除了廠商提供第三方認
也需考慮影像辨識率,必須由影像解析度 (Resolution) 下手, 證之外,在台積電可與內部實驗室合
其他相機參數如工作距離 (Working Distance, WD)、視野範圍 作,透過定性且定量分析,以不同濃
(Field of View, FOV)、景深 (Depth of field, DOF)、感光元件 度 ( 低、中、高 ) 檢測廠商量測儀器,
尺寸、焦距 (f),在相機與鏡頭選用時都是需要考慮的條件。 比對與台積電合格儀器之減量線差異
以下說明應用於漏水辨識之相機與鏡頭如何搭配選用,距離相 性,再利用環境量測修正減量線,最
機 5 公尺外的漏水點為例 ( 如 圖4),選定相機畫素、感光元 後調整減量線 ( 校正曲線 ) 使儀器更
件尺寸,並定出工作距離與鏡頭焦距經過計算,影像解析度為 符合在廠內應用 ( 如 圖 6)。
388pix/m×421pix/m,水平解析度由模擬計算器得到驗證為
現場氣體採樣方式建議可彈性採樣,
[6]
394pix/m ,此解析度需滿足進行視覺辨識時,所拍攝影像的
垂直方向低、中及高或水平方向東、
最低解析度,才能透過檢測驗算法對影像內的目標物識別與缺
西、南及北,此方式可應用於當環境
陷判斷,解析度與工作距離的應用,將於第四章說明。
異常時確認氣體濃度分佈,因此當嗅
嗅覺感測器的使用根據不同需求應用於不同環境,制定了一套 覺感測器應用於機器人時建議將此採
監測標準,例如廠內安全則需考量爆炸上下限、人員健康及產 樣方式納入功能。當嗅覺感測器使用
品良率考量則需監測環境氣體濃度範圍由 ppm~ppb( 如 圖 5)。 於載台時須考量幾點限制,如:耗電、
不同區域所需量測的氣體,可先透過非即時採樣送至實驗室或 傳輸方式、儀器震動等,將在第四章
第三方公證量測得知氣體成份及濃度,常見之汙染物成份表 嗅覺感測器應用時說明。
300mm FABS FACILITY JOURNAL MARCH 2018 83