
Page 77 - Vol.40
P. 77
57
55
51
53
68
66
64
62
機台一個建議定期保養週期,確保化學品循環過濾次數能 61 52 63 54 2.3 智慧倉儲 [3] DRU傳輸,安裝時需特別注意RGV&DHL馬達傳輸速率, 65 56 ④ 漏液檢知功能 : ASRS初始並無設計漏液檢知機能,但不同於傳統倉儲系統,內部平日並無人員進入巡檢,若發生 67 58
恢復至正常水位後再執行下一次的保養。 RGV滾輪傳送速度初版設計為12m/min,而DRU滾輪傳送 化學品洩漏將無法第一時間感知,故將ASRS所有區域以帶狀式漏液檢知器圈圍,作為極早期偵測手段,如 圖7為其分布
智慧倉儲是指在自動倉儲管理基礎上,利用RFID射頻
目前DCM的計算,係建立於設備端的化學品需求流量 速度設計為5m/min,在試車階段發現傳輸速度差會產生打 範圍。
識別、網路通信、信息系統應用等信息化技術及先進的管
為一固定值的假設,故目前僅適用於設備端需求流量較為 滑現象,長期不均勻施力也可能造成DRU馬達受損,為免
理方法,實現入庫、出庫、盤庫、移庫管理的信息自動抓
穩定的化學品。未來若將廠務端供應機台的出口流量計即 傳送過程速度差導致貨物傾倒,決議更換RGV馬達,將其
取、自動識別、自動預警及智能管理功能,以降低倉儲成
時數據,導入DCM的計算程式中,相信可更廣泛地適用在 滾輪傳送速度為降為5m/min與DHL傳輸速率匹配避免未來
本、提高倉儲效率、提升倉儲智慧管理能力。
各種DU化學品的循環過濾次數計算。 運轉異常。
其中,倉儲信息自動抓取功能是指對貼有電子標簽(例
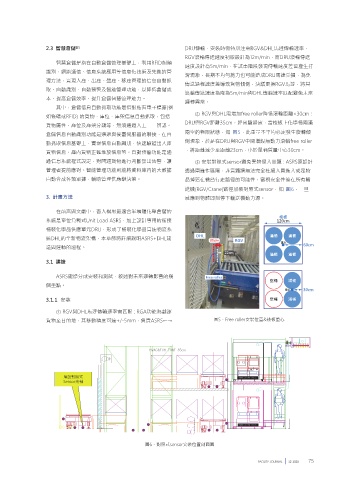
② RGV與DHL需增加free roller降低滾輪距離<30cm :
如條碼或RFID) 的貨物、庫位、庫架信息自動抓取,包括
參考文獻 DRU與RGV距離35cm,經實驗證實,當棧板上化學桶兩滿
貨物屬性、庫位及庫架分類等,無須通過人工一一辨認。
[1] 曾恒毅,2019,因應研發先進製程轉量產之氣體與化學供應系統 倉儲信息自動識別功能是通過與後臺伺服器的聯接,在自 兩空的極限狀態,如 圖5,此重量不平均必定發生旋轉傾
運轉策略。廠務季刊,Vol: 33。 倒現象,於是在DRU與RGV中間增設無動力滾輪free roller
[2] 徐銘宗、江宜臻、謝欣容,2013,先進半導體廠化學品供應系統 動抓取信息基礎上,實現信息自動識別,快速驗證出入庫
及微粒子控制。廠務季刊,Vol: 10。 貨物信息、庫內貨物正確堆放信息等。自動預警功能是通 ,將距離減少至距離23cm,小於單桶質量中心30cm。
過信息系統程式設定,對問題貨物進行判斷發出告警,讓 ③ 安裝對照式sensor避免異物侵入問題 : ASRS原設計
管理者提前應對。智能管理功能則能將資料庫內的大數據 透過圍籬作區隔,非實體牆無法完全杜絕人員進入或是物
自動合成各類單據,輔助管理供應鏈決策。 品掉落在機台行走路徑的可能性,審視安全性後在所有輸
送機(RGV/Crane)路徑加裝對照式sensor,如 圖6,一旦
3. 計畫方法 感應到物體即刻停下輸送機動力源。
在前言與文獻中,吾人構思最適合半導體化學倉儲的
棧板
系統是單位負載式Unit Load ASRS,加上設計專用的銜接 120cm
桶裝化學品供應單元DRU,形成了桶裝化學品高速物流系
統DHL的全新物流架構,本章節將詳細說明ASRS+DHL建 DHL 35cm 滿桶 滿桶
RGV
重心
造與運轉的過程。 60cm
22cm
滿桶 滿桶
3.1 建造
ASRS建造分成安裝和測試,敘述對未來運轉影響的幾 Free roller
空桶 滿桶
個重點。
重心 30cm
3.1.1 安裝 空桶 滿桶
① RGV與DHL馬達傳輸速率需匹配 : RGA功能為載運
貨物至目的地,其移動精度可達+/-5mm,負責ASRS←→ 圖5、Free roller安裝位置&棧板重心
增設對照式
Sensor光軸
圖6、對照式sensor安裝位置剖面圖
71 72 73 74 FACILITY JOURNAL 1 2 2 0 2 0 75 76 77 78
5. 結論 15P7成功導入了ASRS+DHL模式,改變了半導體廠化
學品物流運作邏輯,大幅減少了人力輸送所需的時間。目
經過一年多的努力,廠務終於建構出ASRS+DHL化學
前各式酸、鹼類化學品已經完全導入此系統,惟有機化學
品物流新標準。廠務在最先進的N5/N7新廠區藉由收集安
品(solvent) 礙於系統防爆設計規畫及法規檢討尚未完成,
裝/試車/運轉,各個階段的使用者經驗,得出許多寶貴的
仍需人力搬運上機。未來展望繼續開發防爆型ASRS,期望
智慧結晶。整理如下:
有朝一日有機化學品也能達成全自動化倉儲。本專案歸功
① 系統安裝: 於廠區的即時回饋和設計部的快速反應,讓問題迎刃而解
• 與DHL傳輸的RGV馬達傳送速度改為5m/min ,也讓新廠區來得及站在巨人的肩膀上,避免重蹈覆轍。
期許這些經驗傳承,能讓既有廠區降低轉型所需面對的未
• DHL與RGV距離增加free roller使距離小於30cm
知風險,建立信心開始發展新世代的桶裝化學品高速物流
• 對照式sensor安裝 系統。
• 帶狀式leak sensor
• manual port自動門安裝 參考文獻
② 試車階段 : 增加測試棧板種類與數量,及早發現運轉問 [1] 呂明山(2018)。工業4.0時代來臨∶機械工業4.0。科技大觀園
。2018年10月1日,取自https://scitechvista.nat.gov.tw/c/s
題,及早調整。 gTm.htm
[2] 自動化立體倉儲的優越性-MBA智库百科,http://wiki.mbal
③ 運轉階段 : 共有6項改善,皆已列入標準設計。 ib.com/zh-tw/自動化立體倉儲的優越性。
[3] 智慧物流與倉儲專輯-RFID讓倉儲系統全面透明化,DIGITIMES
• 運轉資訊不足 : 建立運轉KPI 企劃2013。
• 定位sensor調整÷提早於試車階段驗證
• 定位sensor誤作動÷增加集光罩
• DRU棧板傳送卡板÷DRU改雙動力滾輪
• 棧板膠膜干擾÷增設異常警報延時
• ASRS系統online狀態下異常無警報÷增設異常警報
,提醒管理者已進入半自動操作
81 82 83 84 85 86 87 88
91 92 93 94 95 96 97 98