
Page 80 - Vol.40
P. 80
60
59
58
55
56
57
52
53
54
51
5. 結論
Mode, REM)及動態型精算模式(Dynamic Calculation
用於時序密度需求較高的線上Defect比對。實際應用的結
Mode, DCM)兩種新型的計算模式,針對桶裝化學品供應
果顯示,REM確實可用於某些化學品在跨廠區大方向上概
系統(Drum Unit, DU)的循環過濾次數進行計算。REM以每
略的比對,但若需評估短時間內化學品需求頻率對於供應
日桶裝化學品的使用量作為計算基礎,可用於跨廠區相同
品質的影響,還是需透過DCM的計算結果,才可提供較為
合理的說明。此外,本研究也透過DCM的模擬,提供線上
系統的循環過濾次數概略性比對 ; 而DCM則是使用固定時
64
68
65
63
61
67
62
66
Tech 69 70 本研究提出了概略型估算模式(Rough Estimation 間內化學品總需求秒數作為計算基礎,因計算頻率高,適
Notes
技術專文
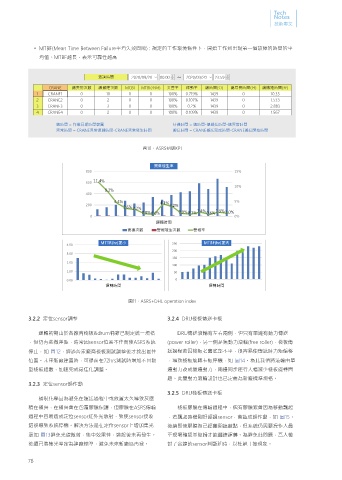
機台一個建議定期保養週期,確保化學品循環過濾次數能 • MTBF(Mean Time Between Failure平均失效間隔) : 規定的工作環境條件下,開始工作到出現第一個故障的時間的平
恢復至正常水位後再執行下一次的保養。 均值。MTBF越長,表示可靠性越高
目前DCM的計算,係建立於設備端的化學品需求流量
為一固定值的假設,故目前僅適用於設備端需求流量較為 查詢時間 2020/09/20 00:00 ~ 2020/09/20 23:59
穩定的化學品。未來若將廠務端供應機台的出口流量計即
CRANE 總異常次數 總搬運次數 MCBI MTBI(小時) 妥善率 稼動率 總時間(分) 總易長時間(分) 總搬運時間(分)
時數據,導入DCM的計算程式中,相信可更廣泛地適用在 1 CRANE1 0 10 0 0 100% 0.719% 1439 0 10.35
各種DU化學品的循環過濾次數計算。 2 CRANE2 0 2 0 0 100% 0.107% 1439 0 1.533
3 CRANE3 0 3 0 0 100% 0.2% 1439 0 2.883
4 CRANE4 0 2 0 0 100% 0.109% 1439 0 1.567
參考文獻 總時間 = 作業日期時間範圍 待機時間 = 總時間-總搬送時間-總異常時間
異常時間 = CRANE異常復歸時間-CRANE異常發生時間 搬送時間 = CRANE搬送完成時間-CRANE搬送開始時間
[1] 曾恒毅,2019,因應研發先進製程轉量產之氣體與化學供應系統
運轉策略。廠務季刊,Vol: 33。
[2] 徐銘宗、江宜臻、謝欣容,2013,先進半導體廠化學品供應系統 圖10、ASRS初版KPI
及微粒子控制。廠務季刊,Vol: 10。
異常發生率
800 15%
11.4%
600
10%
8.2%
400
4.4% 5%
200 4.1% 3.2%
2.6% 2.2%
0.8% 0.6% 0.9% 0.7% 1.4% 0.6% 1.3% 1.0%
0 0%
運轉時間
更換次數 警報發生次數 警報率
MTTR(hr)望小 2 5 0 MTBF(hr)望大
4 . 0 0
2 0 0
3 . 0 0
1 5 0
2 . 0 0
1 0 0
1 . 0 0 5 0
0 . 0 0 0
運轉時間 運轉時間
圖11、ASRS+DHL operation index
3.2.2 定位sensor調整 3.2.4 DRU棧板傳送卡板
運轉初期由於各廠商棧板&drum桶雖已制定統一規格 DRU傳送滾輪有左右兩側,但只有單邊有動力傳送 3.2.6 ASRS系統online狀態下異常無警報 4. 結果與分析
,但仍有些微差距,時常因sensor位置不佳而使ASRS系統 (power roller),另一側是無動力滾輪(free roller),棧板傳
ASRS系統狀態可分3種:①手動÷由人員手動操作 ② ASRS+DHL系統運轉啟用至今。透過分析DHL運轉
停止,如 圖12,經過各家廠商棧板測試調整後才找出最佳 送過程若因棧板老舊底部不平,很容易使傳送時力矩偏移
3.2 運轉 自動÷系統全自動 ③online÷人員介入處理中,需人為下 KPI,找出關鍵警報,如 表2,並逐一克服改善前6大問題
位置。未來新廠建置時,可提前在72hrs測試時增加不同類 ,導致棧板旋轉卡板停機,如 圖14。為此我們將滾輪由單
指令,無法全自動運轉。初期人員維護系統時復歸時皆未 ,有效的將異常發生率從運轉初期的11.4%降至1%,MTTR
型棧板組數,加速完成最佳化調整。 邊動力改成雙邊動力,兩邊同步運行大幅減少棧板旋轉問
系統正式開始投入化學品裝載運轉,陸續發現6大問題,與設計部及承商共同完成改善。 切至正確之自動狀態,故與廠商討論將online狀態改成異
題。此雙動力滾輪設計也已定義為新廠標準規格。 從2.5降至0.21hrs/次,MTBF也從51提升至224hrs,有效提
3.2.3 定位sensor誤作動 常狀態,並發出警報,以提醒管理者系統已進入異常處理 升了系統可靠度。
3.2.1 運轉資訊不足
3.2.5 DRU棧板傳送卡板 模式。 此外,透過大數據分析,也能看出自動倉儲對於桶裝
桶裝化學品為避免在運送過程中或放置太久導致灰塵
運轉初期即發現運轉資訊不足,只有紀錄crane的傳輸資訊如 圖10,諸如RGV、Load cell、到站時間等等紀錄不足, 化學品進料到退桶所節省的工時,如 表3,自動倉儲不僅
積在桶身,在桶身會在包覆膠膜保護,但膠膜在ASRS傳輸 棧板膠膜在傳輸過程中,偶有膠膜絮會因為移動飄起
也無法從報表得知運轉表現。為此我們將ASRS資料彙整上傳至台積內部資料處理系統,再將資料轉換成ASRS+DHL 大幅節省了庫房操作員入庫/出庫/領料的動作,從ASRS直
過程中容易造成定位sensor紅外光散射,致使sensor接收 ,若飄起時機剛好經過sensor,會造成誤作動,如 圖15。
operation index,如 圖11,利用以下3個KPI指標來了解運轉健康狀況。 接將桶裝化學品傳輸進入DRU的工作,也讓棧板工作時間
錯誤導致系統停機。解決方法是在定位sensor上增加集光 後續即使膠膜絮已經離開遮蔽點,但系統仍需要操作人員
• 異常警報率 : 異常次數/傳送次數,來了解系統健康度 從原本60分鐘大幅降低至只需要花費20分鐘,整體傳輸時
罩如 圖13避免光線散射,集中效果佳,裝設後未再發生。 至現場確認並復歸才能繼續運轉。為避免此問題,吾人檢
間節省了67%。
• MTTR(Mean Time To Repair平均修復時間) : 從出現故障到恢復中間的這段時間,MTTR越短表示嚴重失效行為越少 後續已將集光罩定為建廠標準,避免未來新廠區再發。 討了合適的sensor判斷延時,以杜絕干擾現象。
71 72 73 74 75 76 77 78 79 80
5. 結論 15P7成功導入了ASRS+DHL模式,改變了半導體廠化
學品物流運作邏輯,大幅減少了人力輸送所需的時間。目
經過一年多的努力,廠務終於建構出ASRS+DHL化學
前各式酸、鹼類化學品已經完全導入此系統,惟有機化學
品物流新標準。廠務在最先進的N5/N7新廠區藉由收集安
品(solvent) 礙於系統防爆設計規畫及法規檢討尚未完成,
裝/試車/運轉,各個階段的使用者經驗,得出許多寶貴的
仍需人力搬運上機。未來展望繼續開發防爆型ASRS,期望
智慧結晶。整理如下:
有朝一日有機化學品也能達成全自動化倉儲。本專案歸功
① 系統安裝: 於廠區的即時回饋和設計部的快速反應,讓問題迎刃而解
• 與DHL傳輸的RGV馬達傳送速度改為5m/min ,也讓新廠區來得及站在巨人的肩膀上,避免重蹈覆轍。
期許這些經驗傳承,能讓既有廠區降低轉型所需面對的未
• DHL與RGV距離增加free roller使距離小於30cm
知風險,建立信心開始發展新世代的桶裝化學品高速物流
• 對照式sensor安裝 系統。
• 帶狀式leak sensor
• manual port自動門安裝 參考文獻
② 試車階段 : 增加測試棧板種類與數量,及早發現運轉問 [1] 呂明山(2018)。工業4.0時代來臨∶機械工業4.0。科技大觀園
。2018年10月1日,取自https://scitechvista.nat.gov.tw/c/s
題,及早調整。 gTm.htm
[2] 自動化立體倉儲的優越性-MBA智库百科,http://wiki.mbal
③ 運轉階段 : 共有6項改善,皆已列入標準設計。 ib.com/zh-tw/自動化立體倉儲的優越性。
[3] 智慧物流與倉儲專輯-RFID讓倉儲系統全面透明化,DIGITIMES
• 運轉資訊不足 : 建立運轉KPI 企劃2013。
• 定位sensor調整÷提早於試車階段驗證
• 定位sensor誤作動÷增加集光罩
• DRU棧板傳送卡板÷DRU改雙動力滾輪
• 棧板膠膜干擾÷增設異常警報延時
• ASRS系統online狀態下異常無警報÷增設異常警報
,提醒管理者已進入半自動操作
81 82 83 84 85 86 87 88 89 90
91 92 93 94 95 96 97 98 99 100