
Page 88 - Vol.43
P. 88
Tech
Notes
技術專文
各Group每年分析運轉上的痛點與需求,於Group平台 ① 搬酸機器人
討論後,提出自動化改善的建議方案,經過各平台專家的評
廠務搬運化學品的工作屬於高風險、高勞力的吃重工
估,最終結果往上提報到廠務自動化發展平台做專案開發與
作,改善TCM高危險的工作環境,減少TCM接觸化學品風險
導入的管理。2018~2020年,廠務自動化發展平台陸續完成
及改善高勞力搬運環境,值得廠務投資機器人自動搬運來達
了多項的自動化專案開發,結果如 圖10所示。各自動化專案
成這個目標,除了可以提升廠務運轉效率外,也同時對台積
內,不乏資訊整合、IoT、AI與機器人等智慧化、數位轉型技
電社會企業責任作出貢獻。因為1F庫房區需要從自動流道叉
術之發展,自動化發展平台的成立對於廠務數位轉型來說,
取化學棧板,並搬運至庫房雙層料架上,所以規劃具有可以
踏出了廠務智慧化、數位轉型的第一步。
將物品抬升到雙層料架放置之堆高機式AGV來進行入庫、領
料等工作 ; 1F~2F之間的運送,因化學品搬運電梯有空間尺寸
與重量的先天限制,所以設計具有重量較輕、尺寸較小潛盾
式AGV來進行自動搬運。前後段AGV銜接完成整個化學品物
料入庫、領料、搬運、退空桶等一條龍作業流程的自動化,
如 圖12。
圖10、2018~2020廠務自動化技術發展成果
3.2 廠務智慧化技術發展 圖12、F14P12一條龍自動搬酸流程圖
下文中將針對廠務近幾年數位轉型的智慧化技術發展,
列舉實例說明。 ② 巡檢機器人
3.2.1 機器人技術開發 巡檢為廠務要達到穩定運轉所需的日常重要工作之一,
花費工程師諸多時間透過巡檢來管理現場的系統、6S、PM、
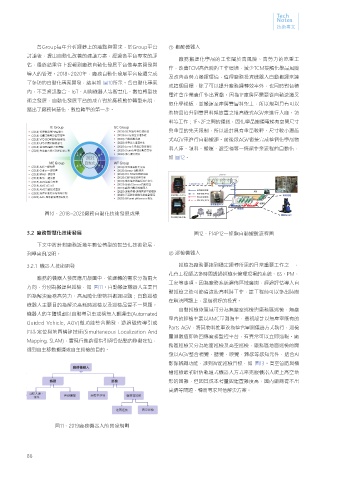
廠務的機器人發展應用版圖中,依運轉的需求分為兩大
工安等事項。因為廠務系統遍佈區域廣闊,經過評估導入自
方向,分別為搬運與巡檢,如 圖11。自動搬運機器人主要目
動巡檢之後可節省這些高耗時工作,讓工程師可以多出時間
的為解決廠務高勞力、高風險化學物料搬運問題;自動巡檢
在解決問題上,是個很好的投資。
機器人主要目的為解決高耗時巡檢以及巡檢品質不一問題。
自動巡檢依區域可分為無塵室巡檢與廠務區巡檢,無塵
機器人的主體規劃以自動導引車或稱無人搬運車(Automated
室內的巡檢主要以AMC量測為主,最初設計以無塵室既有的
Guided Vehicle, AGV)做功能整合開發,透過磁條導引或
Parts AGV,將其物料推車改為整合量測儀器方式執行,巡檢
同步定位與地圖構建技術(Simultaneous Localization And
量測數值即時回傳廠務監控平台,有異常可以立即通報。廠
Mapping, SLAM),實現行進路徑指引與各站點的移動定位,
務區巡檢又分為地面巡檢及高空巡檢,廠務區地面巡檢的開
達到自主移動搬運或自主巡檢的目的。
發以AGV整合視覺、聽覺、嗅覺、體感等感知元件,結合AI
影像辨識功能,達到智能巡檢目標,如 圖13。高空管路與桶
槽巡檢最初評估軌道式機器人方式來克服機器人爬上高空地
形的困難,但因其成本考量與建置難度高、國內廠商提不出
實績等問題,轉而尋求其他解決方案。
圖11、2019廠務機器人的開發規劃
86