
Page 56 - Vol.45
P. 56
Tech
Notes
技術專文
2.3 粒狀污染物的重力沉降 3. 研究方法
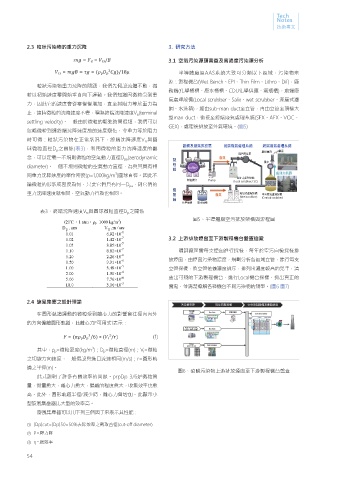
3.1 空氣污染源頭普查及高濃度污染源分析
半導體廠區AAS系統大致可分類以下區域,污染物來
源:製程機台(Wet Bench、EPI、Thin Film、Lithro、Dif),廠
粒狀污染物重力沈降的問題,我們先假設流體不動,微
務端(化學桶槽、廢水桶槽、CDU化學供應、氣瓶櫃),前端廢
粒以初始速度零開始垂直向下運動。我們知道因微粒受到重
氣處理設備(Local scrubber、Salix、wet scrubber、深層式濾
力,因此它的速度會從零慢慢增加,直至其阻力等於重力為
網、水洗箱),經由sub-man duct至立管,再由立管至頂樓大
止,這時微粒的沈降速度不變,稱為終端沈降速度V ts (terminal
型man duct,銜接至終端廢氣處理系統(SEX、AEX、VOC、
settling velocity)。一般由於微粒的鬆弛時間很短,我們可以
GEX),處理後排放至外氣環境。(圖5)
忽略微粒到達終端沈降速度前的速度變化,令重力等於阻力
時可得:粒狀污染物在正常狀況下,終端沈降速度V ts 與圓
設備及廢氣排放區 前端廢氣處理系統 終端廢氣處理系統
球微粒直徑D p 之關係(表3),利用微粒的重力沈降速度的觀
風管匯集區 廠排煙囪
念,可以定義一不規則微粒的空氣動力直徑D pa (aerodynamic 廢氣
製 C.H. A C.H. B 風車
diameter)。一個不規則微粒的空氣動力直徑,為與其具有相 程 C.H. C buffer C.H.D
端
3
同重力沈降速度的單位密度(p=1,000kg/m )圓球直徑。因此不 L.L L.L 處理完氣體
現址式處理設備
製程機台 Pump (Local scrubber,LSC)
論微粒的形狀或密度為何,只要它們具有同一D pa ,則它們的
廠
重力沈降速度就相同,空氣動力行為也相同。 務 廢氣 現址式處理設備 中央廢氣處理設備
端 (Wetscrubber) (Centralscrubber)
化學桶槽 廢水桶槽
表3、終端沈降速度V ts 與圓球微粒直徑D p 之關係
圖5、半導體廠空污排放架構與流程圖
3.2 上游排放煙囪至下游製程機台盤查追蹤
環評廠區需每支煙囪進行採樣,每年於空污自檢採樣排
放煙囪,由煙囪污染物濃度,規劃分析各區域立管,進行每支
立管採樣,將立管依據濃度排序,排列出濃度較高的兇手,清
查出可疑的下游製程機台,進行Local機台採樣,抓出真正的
魔鬼,並清楚瞭解各種機台不同污染物的類型。(圖6 圖7)
2.4 旋風集塵之設計理論
在圓形軌道運動的微粒受到離心力的影響會往徑向向外
的方向偏離圓形軌道,此離心力F可用式1表示:
3
其中,ρ p =微粒密度(kg/m );D p =微粒直徑(m);V i =微粒
之切線方向速度,一般假設與進口流速相同(m/s);r=圓形軌
道之半徑(m)。
圖6、硫酸污染物上游排放煙囪至下游製程機台盤查
此式說明了許多有關效率的問題。prpDp 3/6是微粒質
量,質量愈大,離心力愈大,偏離的程度愈大,收集效率也愈
高。此外,圓形軌道半徑r減少時,離心力會增加。此顯示小
型旋風集塵器比大型的效率高。
旋風集塵器可以用下列三個因子來表示其性能:
① [Dp]cut=[Dp]50=50%去除效率之截取直徑(cut-off diameter)
② P=壓力降
③ η=總效率
54