
Page 82 - Vol.29
P. 82
New
Vision
新象新知
人仍可保持非常安全的運作。優點是
整體網通設備建置與規劃配置簡單,
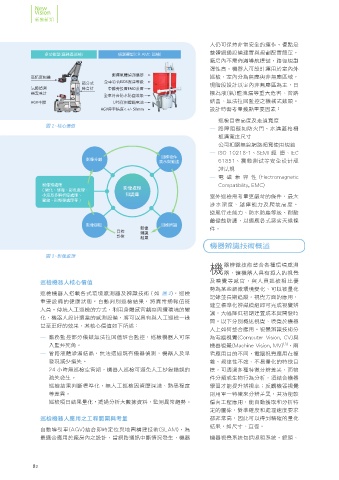
多功能型(廠務區巡檢) 偵測器型(CR AMC 巡檢)
廠房內不需佈滿導航標誌,路徑規劃
彈性高。機器人可設計運用於室內外
搬運氣體偵測儀器
高精度相機 巡檢,室內分為無塵與非無塵區域,
積分式 全車符合ISO5潔淨等級 現階段設計以室內非無塵區為主,目
氣體偵測 噪音計 車體旁設置EMO裝置
器異味計 標為液(氣)體洩漏等重大危害、管路
全車符合防水防塵等級
AGV車體 UPS採用鋰鐵電池 結晶、無法拉回監控之機械式錶頭。
AGV停車精度< +/- 50mm 設計時需考量幾點重要因素:
─ 巡檢目標高度及走道寬度
圖 2、核心價值
─ 路障阻礙如防火門、水溝蓋格柵
板溝寬度尺寸
─ 公司相關無線網路頻寬使用規範
─ ISO 10218-1、SEMI 認 證、IEC
目標物件
影像分割
表示與敘述 61851、震動測試等安全設計認
證法規
─ 電 磁 兼 容 性 (Electromagnetic
影像預處理 Compatibility, EMC)
( 強化、修復、彩色處理、 影像處理
小波及多解析度處理、 知識庫 室外巡檢需考量更嚴苛的條件,最大
壓縮、形態學處理等 )
涉水深度、越障能力及爬坡高度、
逆風行走能力、防水防塵等級、耐酸
鹼侵蝕防護,以適應各式惡劣天候條
影像擷取 目標辨識
影像 件。
目標 辨識
影像 結果
機器辨識技術概述
圖 3、影像處理
機 器辨識技術整合各種環境感測
器,讓機器人具有擬人的視覺
巡檢機器人核心價值 及嗅覺等感官,與人員巡檢相比優
勢為某些細微環境變化,可以被量化
巡檢機器人搭載各式環境感測器及辨識技術 ( 如 圖2),巡檢
記錄並長期追蹤。視覺方面的應用,
重要設備的健康狀態,自動判別巡檢結果,將異常通報值班
建立標準化辨識模組即可完成視覺辨
人員。傳統人工巡檢的方式,利用身體感官觀察周遭環境的變
識,大幅降低初期建置成本與開發時
化,機器人設計適當的感測設備,將可以具有與人工巡檢一樣
間。以下分別概述視覺、嗅覺於機器
甚至更好的效果,其核心價值如下所述:
人上如何整合應用。視覺辨識技術分
─ 廠務監控部分儀錶無法拉回值班台監控,巡檢機器人可深 為電腦視覺(Computer Vision, CV)與
[3]
入監控死角。 機器視覺(Machine Vision, MV) ,兩
─ 管路液體滲漏結晶,無法透過既有儀器偵測,機器人及早 者應用目的不同,電腦視覺應用在複
發現減少損失。 雜、規律性不強、不易量化的特徵目
─ 24 小時無巡檢空窗期,機器人巡檢可避免人工抄錄錯誤的 標,可透過多種特徵分辨差異,而物
疏失發生。 件分類或生物行為分析,須結合機器
─ 巡檢結果判斷標準化,無人工巡檢因資歷深淺、熟悉程度 學習才能提升辨視率;反觀機器視覺
等差異。 則用單一特徵來分辨差異,其功能較
─ 巡檢項目結果量化,透過分析大數據資料,監測異常趨勢。 偏向工程應用,能自動獲取和分析特
定的圖像,對準確度和處理速度要求
巡檢機器人應用之工程範圍與考量 都非常高,因此可以得到精確的量化
結果,如尺寸、直徑。
自動導引車(AGV)結合即時定位與地圖構建技術(SLAM),為
最適合應用於廠房內之設計,當網路通訊中斷情況發生,機器 機器視覺系統包括照明系統、鏡頭、
82