
Page 35 - Vol.47
P. 35
EAOC Review改善案例如下,Module計畫在CWR Side 3.2 精准監控搭建OMDS(Offline Mapping DataBase System)
Room新增軌道機器人,經廠務現場勘察,並依據規劃change
無塵室中機台分佈等外部環境,會隨著現場實際裝移機等
圖紙(圖7)進行CFD模擬。圖8所示為軌道機器人氣體流場模擬
需求不斷變化。大部分因change而產生的不良反應,會在前期評
圖。因軌道機器人直接固定在高架地板上,導致原downflow氣
估改造時可以進行預見性避免或克服。但一些類似於OPI電腦移
流受阻使得流線平行度大幅下降。特別是靠近軌道機器人附近
位導致回風變化,機台制程改變導致熱濕負荷變化等等不受管控
氣流平行度變化明顯,存在渦流現象,有間接導致環境品質下
的change,會在不經意間因量變引發質變,使得現場氣流組織發
降,PD管控難度上升的問題。經廠務研判建議將部分區域地板
生細微改變,進而導致環境管控參數異常,具體表像為Particle數
品類(蜂板→格柵板)進行更換(孔隙率:17%→50%),計畫通過減
值上升,溫濕度不均勻,橫向風增大等等。然而,在廠區建廠初
小產生的局部阻力來緩解安裝機器人新增而帶來的阻力,達到
期均會考慮到成本因素,遠端溫濕度監視及調控都是區域性的,
平衡阻力的目的。由此可見,通過前期數值模擬我們可以預測
這就會存在各區域內部的溫濕度等參數是否一致的問題。要想
change給我們帶來的影響,從而change評估提供正確的方向。
弄清這一問題,就必須要進行線下量測,並定期收取Data以確定
溫濕度是否偏離Baseline。正因如此,我們建立了Offline Mapping
DataBase System來確保現場變化能及時被知曉。
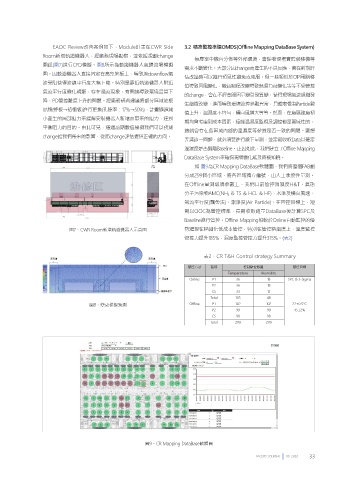
如 圖9為CR Mapping DataBase軟體圖,我們將整個FAB劃
分成299個小區域,將各區域獨立編號,由人工季度性量測。
在Offline量測環境參數上,我們目前管控溫濕度H&T、氣態
分子污染物AMC(NH 3 & TS & HCL & HF)、水準及橫向風速、
氣流平行度(飄帶法)、潔淨度(Air Particle)。在管控目標上,短
期以OOC為管控標準,長期收取適量DataBase後計算SPC及
Baseline進行管控。Offline Mapping相較於Online自動監控的優
圖7、CWR Room新增軌道機器人示意圖 勢體現在精細化低成本管控,特別在管控精細度上,溫度監控
管控力提升185%,濕度監控管控力提升315%。(表2)
表2、CR T&H Control strategy Summary
管控方法 區域 控制點位數量 管控目標
Temperature Humidity
Online P1 36 18 SPC & 3-Sigma
P2 36 18
CS 33 12
Total 105 48
圖8、變更模擬預測 Offline P1 102 102 22±0.5°C
P2 99 99 45±2%
CS 98 98
Total 299 299
圖9、CR Mapping DataBase軟體圖
FACILITY JOURNAL 09 2022 33