摘要



目前廠內在潔淨室、氣體房、化學房、電腦機房、變電站...等區域安裝的火災煙霧偵測器,不論是VESDA、光電或離子式偵測器,須待現場煙霧濃度擴散及遮蔽率達一定程度以上,警報才會觸發,(依不同環境可能耗時 2~3 分鐘以上)然而此時煙霧及火勢,可能已無法控制,甚至於一發不可收拾。 智慧型火災影像偵測系統 ( VFDS System),是採用CCTV攝影機擷取影像後,利用創新的影像分析與演算技術,即時偵測火焰及煙霧,並在30秒內完成判斷分析,於火災災害之初期及時反應發出警報至控制中心,使緊急應變小組能應用VFDS System 迅速定位出火災的實際位置,爭取寶貴的黃金救災時間。
前言
原被視為傳統產業的安全器材工業,也因為電子資通訊相關技術的迅速發展,逐步朝向實現「智慧型」防災目標作設計,所謂的智慧型防災,便是以簡易、符合人性化的操作為設計,去預防災害發生。隨著影像監控及軟硬體技術的快速發展,影像型火災偵測系統是一種可將影像辨識方法內嵌於相關軟硬體平台,付諸實現來進行防火、防災的創新應用。
火災只要發現得愈早,應變人員便可以及早抑制進而撲滅,相對的人們的生命財產損失將可大幅降低;因此正確、即時通報的警示系統的建置,對緊急應變中心是非常重要的機制。
技術原理
關鍵技術─抓住煙霧及火的特性
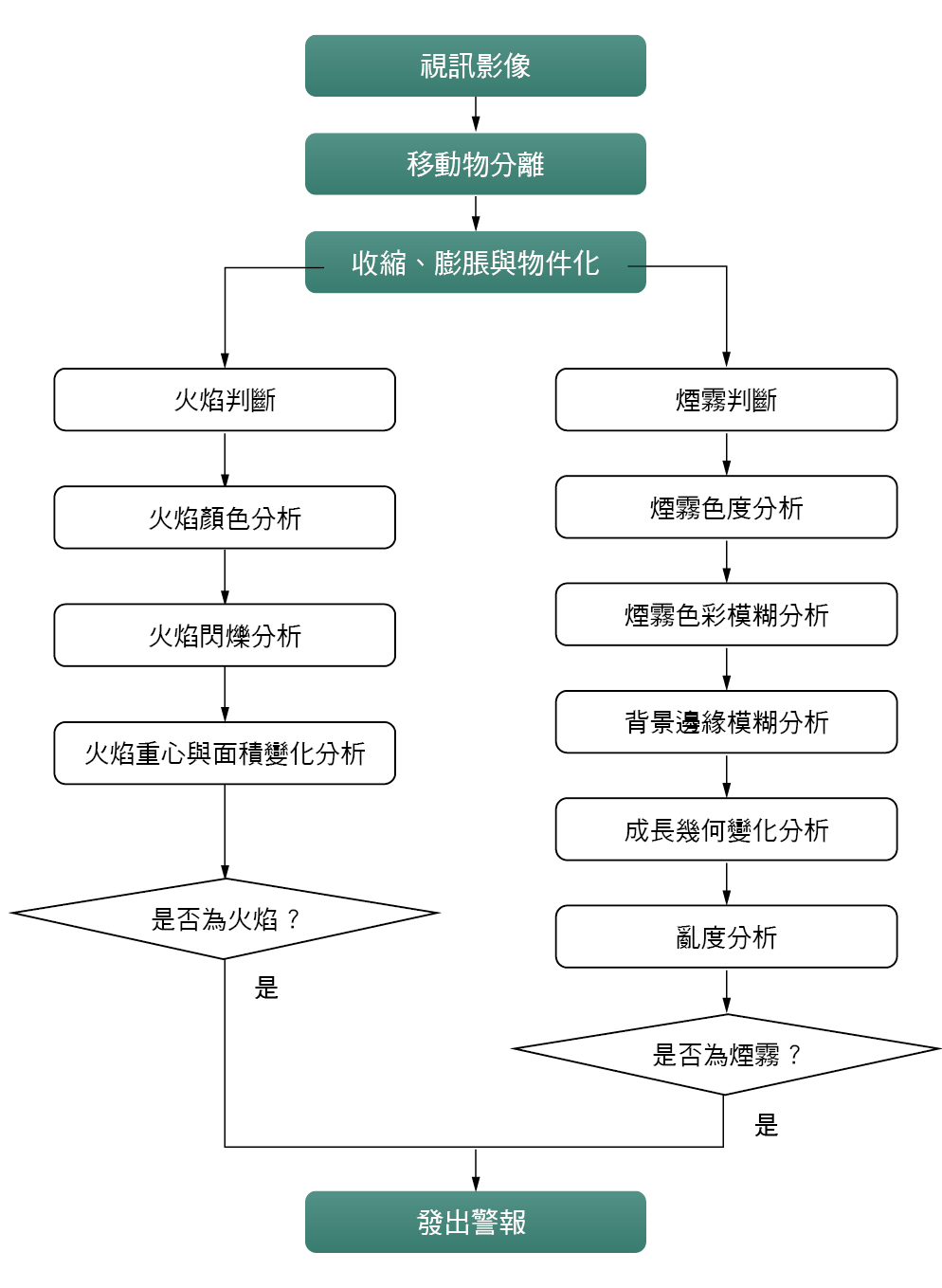
VFDS 系統主要是以"影像畫素變異分析"(Pixel Change Analysis)"為基礎,依據蒐集到的煙霧/火焰之影像資料,依據下列偵測分析流程去判斷影像畫面中是否有火焰或煙霧產生,煙或火哪ㄧ種先偵測出,系統就先發出警報 圖一,未來新的演算法將採用動態紋理追蹤及圖像處理的技術,如背景和前景減法,圖像分割及運動的連貫性模式建立,因動態影像本質上會表現出一些規律的特性 圖二,再整合週遭動量的強度及連貫性找出影像變化的明顯特徵,當一發現運動的連貫性模式產生,系統將會執行自動檢測比對及顏色色度分析,探測煙霧或火焰的真實存在。
圖一、火災影像偵測分析流程圖
圖二、利用週遭動量的強度及連貫性模型找出影像變化特徵

系統特性
一般傳統或定址式偵煙探測器或被動式傳統雷射偵煙探測器,比較容易受環境因素影響,例如空間風速、蒸氣潮溼、空氣中灰塵、防護面積與高度等問題,而導致失效或產生誤報,而主動式抽氣雷射偵煙警報系統 VESDA,可說是為了及早偵測爭取時效而開發出來的產品,在台灣被廣泛應用在半導體廠房之無塵室。然而有其條件限制,例如空間風速、取樣管(孔)安裝之角度與位置、空氣中灰塵粒子等問題,可能因設置不當而導致延遲警報、失效或發生誤報。
智慧型影像型火災偵測系統在技術的研發上,主要是運用數學運算模式的建立及對煙霧、火焰的偵測與判定...是該項技術的核心關鍵。因為火是活的、是會動的,它會蔓延、長大,所以在偵測判定上,有其一定困難度。影像型火災偵測系統的特性,首先是搜尋、接著鎖定要判別的影像、再來做判定工作,先對影像資料做比對分析、再行傳送資料。在搜尋與判定上,首重火及煙辨別模式的建立,若以火的模式建立作為說明,在火的判定上,最容易將光誤判為火,因此必須捉住火的特性:火焰會長大、邊際(edge)會閃動、亮度不均勻等,需設立 and、or 的判斷條件,加上數學運算,以完成對真實火的判讀。
而數學運算與判定時間的多寡,關鍵之處,便是要將各種的離散式數據,在最短時間內加以整合運算再作出判定,目前而言,判定火焰約需20秒,煙霧鑑別則約需30秒可以完成。
大約在10年前國外開發出”影像煙霧分析警報系統”,但是在國內因國家標準與消防法規未納入設置規範,使得這類創新產品未能被大量的推廣與應用。而近三年來”影像煙霧與火燄分析警報系統”又再度的在國際上被大家提起及討論,在2010年Video Image Detection Systems 已正式成為 NFPA 72 National Fire Alarm Codes 之標準。
影像型火災偵測系統之優勢
- 可同時偵測火燄與煙霧
- 解決室內挑高空間火災偵測延遲的問題
- 解決戶外空間火災偵測的問題
- 偵測範圍大,不需大量佈點,可節省成本
- 可結合Security/ IP CCTV系統
- 以視覺方式定位確認警報,縮短應變時間與提昇監控人員應變能力
- 在挑高及空曠空間中,偵測速度較傳統偵測器快偵測速度(約20 ~ 45秒)較傳統偵測器(約> 2 ~ 3分鐘)快速許多
- 火燄偵測:約20 ~ 30秒, 煙霧偵測: 約30 ~ 45 秒
火災影像偵測系統運作原理,是將一般 CCTV 攝影機影像源接至分析主機進行火焰與煙霧判斷,若符合條件則發出警報,功能包括畫面與聲音警示、多媒體簡訊發送、火警盤輸出、警報錄影存檔…等。目前無論是國內外石化廠、發電廠、油庫、機房等,皆有許多火災影像偵測系統安裝成功案例,是火災事件及早期偵測較佳的解決方法之ㄧ,可與現有安裝之偵煙探測器一起建構出完整火災偵測防護網。CCTV 視覺偵測與其他火災偵測系統優缺點: (如 表一) 比較
|
消防法規規定安裝 |
消防法規無規定安裝屬輔助型產品 |
|||||||
|---|---|---|---|---|---|---|---|---|
|
光電式 偵煙器 |
離子式 偵煙器 |
差動式 偵測器 |
定溫式 偵煙器 |
Beam Smoke Detector |
極早型 偵煙器 |
火焰 感測器 |
CCTV 視覺偵測 |
|
|
偵測原理 |
紅外光線遭煙粒子散射或減弱, 使偵測材料產生電壓變化 |
煙霧在加熱高分子材質上離子化產生電流變化 |
周圍溫度上升率在超過一定限度時作動 |
周圍溫度達到一定溫度以上實作動 |
當我災煙霧遮蔽柱狀紅外線光束傳輸時發出警報 |
利用雷射光計算煙霧遮蔽的狀態 |
感測火焰紫外線或紅外線輻射能量 |
以影像色彩與時間變化經數學演算法判斷 |
|
偵測距離 |
<7M |
<7M |
<5M |
<5M |
<100M |
採主動抽氣 |
<15M |
最小偵測面積像素 |
|
價格 |
約900元 |
約900元 |
約300元 |
約300元 |
>2萬元/套 |
>12萬元/套 |
>25萬元/套 |
>3萬元/支 |
|
優點 |
價格便宜 性能穩定 |
價格便宜 性能穩定 |
價格便宜 性能穩定 |
價格便宜 性能穩定 |
可偵測挑高及室外區域 |
非常靈敏 可同時偵測多點 |
非常靈敏 可偵測較長距離 |
同時偵煙偵火 偵測距離不受限制 警報可由影像即時確認 |
|
缺點 |
偵測空間 高度受限 |
偵測空間 高度受限 |
偵測空間 高度受限 |
偵測空間 高度受限 |
偵測範圍有限 價格偏高 安裝不易 |
價格昂貴 誤動作多 無法定位火源 |
價格昂貴 誤動作多 偵測距離範圍受限制 |
價格偏高 無測試標準 |
系統適用地點
- 高風險場所:有可燃性、易燃性物體儲存或高溫存在,例如化學房、氣體房、鍋爐與空調機房。
- 高價值場所: IT 電腦機房、博物館、倉庫與倉儲
- 室內高挑空間:高挑中庭、賣場、大型廠房、巨蛋、隧道
- 戶外空間:儲槽、森林、加油站、機場
系統實測結果
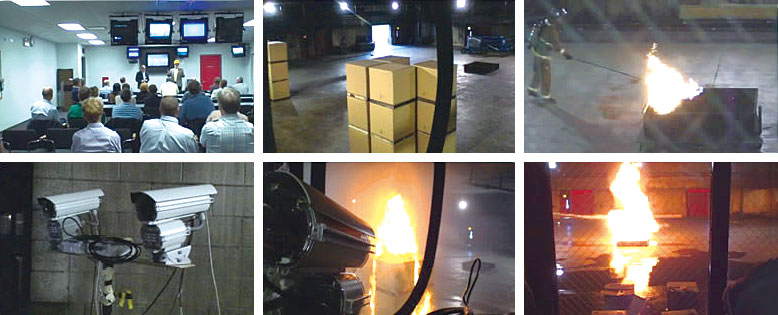
圖三 及 圖四,為 2014年3月10日於台中某倉庫測試庚烷及紙類火災之結果,(分別模擬室內火焰及室內煙霧燃燒,測試距離約 25公尺,偵測路徑無障礙環境),經測試 VFDS 系統在 18 至22 秒,立即以視覺方式確認現場的火災內容、位置與型態,並發出警報。
圖三、庚烷類火焰偵測 – 18 秒警報

圖四、紙類煙霧偵測 – 22 秒警報

結論
一慧型影像火災偵測系統,若能確實在火災事件警報發生30秒之內,立即以直觀的影像方式去確認現場的火災內容、位置與型態,將有效助於減少火災確認通聯之黃金救災時間,對於個人或企業之生命與財產的損失將有積極的作用。
美國從2010 年也開始進行相關影像火災偵測系統的設備FM認証 (如 圖五),智慧型影像火災偵測系統雖然已經是國際認可的偵測技術,但若是要應用在受氣流影響且設備擁擠視綫障礙之高科技廠房無塵室,系統需再特別進行實際模擬驗証,以確定其系統的穩定度及有效性。
圖五、VFDS 系統FM 認證測試實景
參考文獻
- Doretto, G. and Soatto, S. “Editable dynamic textures,” Computer Vision and Pattern Recognition (CVPR), IEEE Computer Society Conference, vol. 2, 2013, pp. II – 137-42.
- Doretto, G., Chiuso, A., Ying, N.W. and Soatto S. “Dynamic textures,” Int J Comput Vis., 51(2), 2003, pp. 91-109.
- Fisher, R.B., Perkins, S., Walker, A. and Wolfart E. “Connected components labeling,” http://homepages.inf.ed.ac.uk/rbf/HIPR2/label.htm#1. Accessed since October 2000.
- Samet, H. and Tamminen, M., “Efficient component labeling of images of arbitrary dimension represented by Linear Bintrees,” IEEE Transaction on Pattern Analysis and Machine Intelligence 10(4), 1988, pp. 579-586.
- Shapiro, L.G. and Stockman, G.C., “Computer vision,” In: Shaprio and Stockman, Binary image analysis, Prentice Hall, 2000, pp. 63-105.
- 工研院---視覺型火災偵測系統–13項專利
- A&S 期刊
- NFPA Code 72
留言(0)