摘要
節水好時機-Cooling Tower液位控制自動化
Keywords / Cooling Tower4,Reused City Water,Industrial City Water2,Distributed Control System



冷卻水塔(Cooling Tower)一直是各廠回收水(RCW)使用量最大的單元,其使用量(即蒸發量)與當下環境的溫度、濕度皆有關,而環境溫濕度又與季節(長期)、日夜(每天)有關,以現況Cooling tower固定液位補水之控制模式會有日間因溫度較高蒸發量大補水量不足需須補充工業用水(ICW),而夜間溫度較低蒸發量小補水量過剩導致原本可回收的水因需求量不足而切往放流的現象,並無法隨日夜環境變化達到水資源利用之最佳化。為解決上述問題,本文提出Cooling Tower水資源管理最佳化之控制模式,利用分散式控制系統(DCS)既有之功能將Cooling tower液位隨蒸發量即時自動調整,夜間可將過剩之RCW蓄積於Cooling tower內供給日間蒸發量較大時使用。效益評估:節水量約~80m3/天,節省自來水用量與廢水排放約14,400m3/年;節能部分,藉單台pump VFD持續追減載即可維持Basin液位,改善後於2020夏~2021春相較2019夏~2020春約降低250,438度/年(約28%);操作改善部分,減少值班人員手動操作Loading與MO可能性,約減少1.25次/天手動操作,全年約減少456次手動操作。
Cooling Towers(CT) always are the most significant Reuse City Water(RCW) using unit of TSMC FABs, the amount of daily usage is mostly related to temperature and humidity, again the two factors are related to what the season and daytime or nighttime it is.
Currently, The control mode of CT water level is to fill or stop by the fixed level setpoint, and it leads to the problem that when daytime RCW is short due to the significant evaporation, so RCW need to be supplied by Industrial City Water(ICW) to meet the demand ; but when it is nighttime, RCW is excess also due to the evaporation, and the excess water finally be discharged as wastewater.
To solve this problem, this article proposed a new control mode of cooling tower water management, that is, Using the grate PID processor function of Distributed Control System(DCS) to make the water level of CT could be dynamically fitted to the current evaporation, so that saved the excess water of nighttime to meet the demand of daytime. The effectiveness is : ①Save 14,400m3 water per year;②Save 250,4387 KWH per year;③For work load reduction : reducing 456 times of manual operation per year.
1. 前言
冷卻水塔(Cooling Tower)一直是各廠回收水(RCW)使用量最大的單元,其使用量(即蒸發量)與當下環境的溫度、濕度皆有關,而環境溫濕度又與季節(長期)、日夜(短期)有關。蒸發損失往往佔冷卻水塔總耗水量的最大部分,在一般大樓約佔 60至90%不等,連續運轉之廠房則普遍在90%以上[1]。
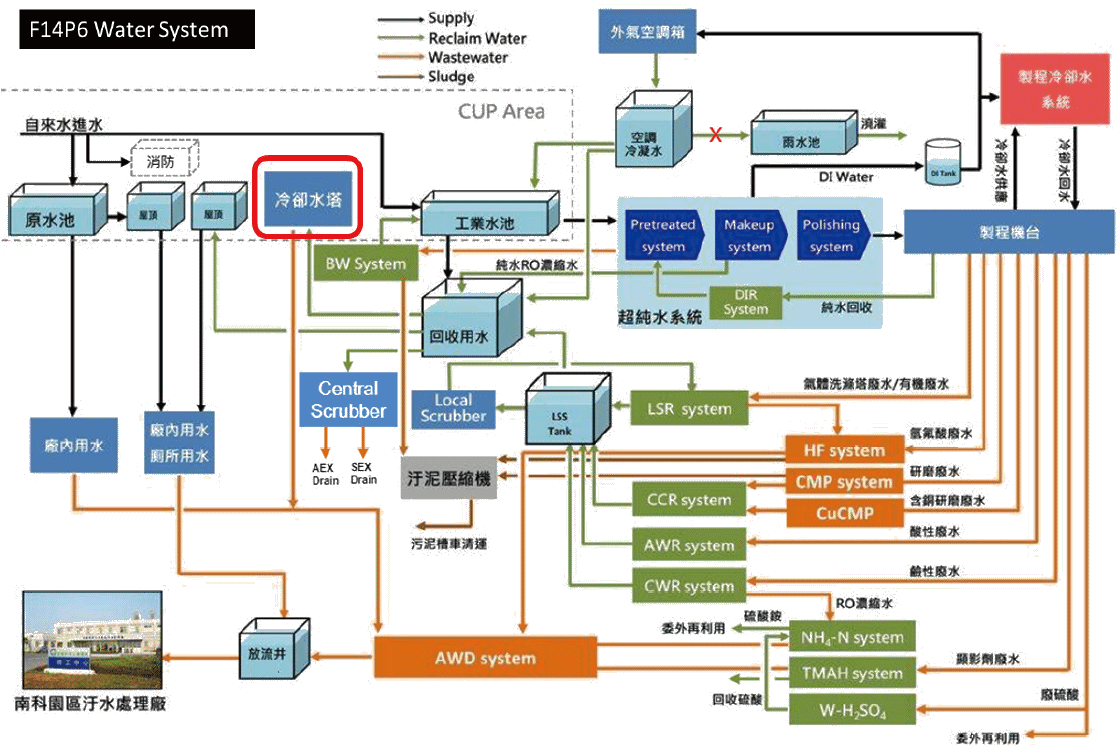
F14P6水系統架構如 圖1所示,Cooling Tower之冷卻水以循環方式冷卻冰機(機械系統Scope)產生之熱,利用灑水蒸發散熱,補充水源為RCW,當RCW不足時以ICW補充之,當Cooling Tower水槽離子濃度過高時會排放至廢水,藉由補充新的RCW降低離子濃度。
以F14P6現況Cooling tower固定液位補水之控制模式會有日間因溫度較高蒸發量大補水量不足需須補充ICW,而夜間溫度較低蒸發量小RCW過剩導致原本可回收的水因需求量不足而切往放流的現象,並無法隨環境變化達到水資源利用之最佳化。為解決上述問題,本文提出Cooling Tower水資源管理最佳化之控制模式,利用分散式控制系統(DCS)既有之功能將Cooling tower液位隨蒸發量即時自動調整,夜間可將過剩之RCW蓄積於Cooling tower內供給日間蒸發量較大時使用。
圖1、F14P6水系統架構[2]
2. 文獻探討
2.1 冷卻水塔
2.1.1 基本原理
冷卻水塔基本的功能乃是經由蒸發部份水量來冷卻水塔中之循環水。冷卻水塔底池流出之冷水,循環到需要冷卻的設備(如壓縮機)中,當熱交換產生後,使得設備溫度降低,而冷卻水則溫度升高,而這溫水將回到冷卻水塔中再次被冷卻,這種循環將一直重複著。
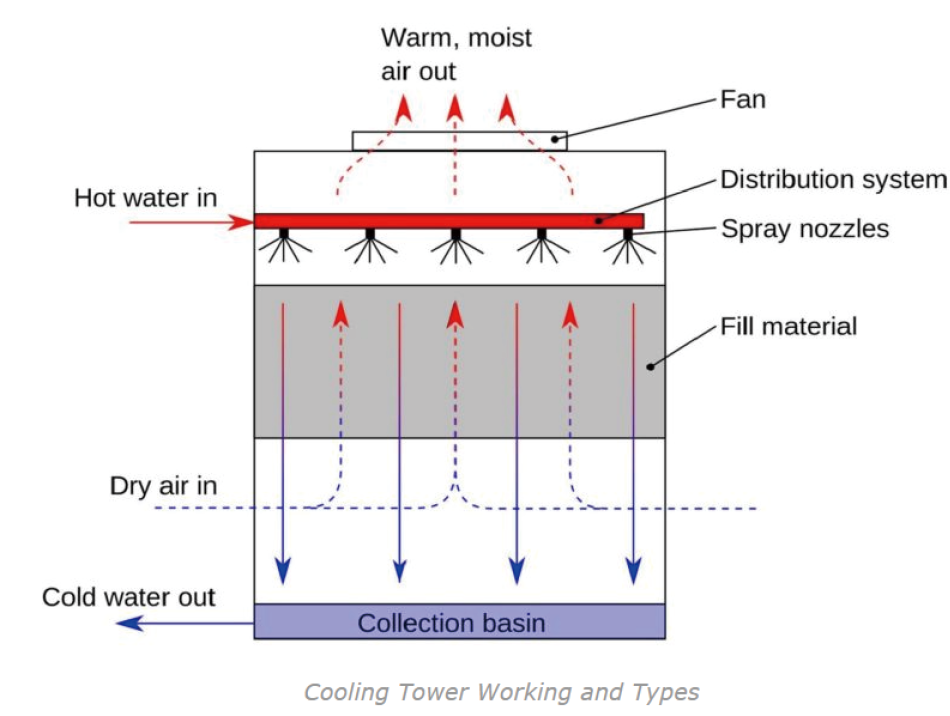
圖2為一簡易的冷卻水塔示意圖,冷卻水塔底池流出之冷水(Cold water out)經過需要冷卻的設備後成為熱水(Hot water in),經由噴頭(Spray nozzles)噴灑並藉由填充材(Fill material)增加與空氣(Dry air in,其動力來源為上方之風機(Fan))之接觸面積蒸發散熱後再回到收集水池(Collection Basin)。
圖2、冷卻水塔示意圖[3]
降溫機制部分,熱水被噴灑經過空氣流,造成部份水量之蒸發,水溫因此而降低。水滴在空氣流中,經由輻射(radiation)、傳導(conduction)、對流(convection)及大部份由蒸發(evaporation)的方式將熱從水塔中帶出。當水份蒸發時,它必須從液相變成氣相,這種不同相之變化所需能量正好可由溫水中之熱能來提供。這種能量被稱為「潛熱(latent heat)」[1]。
2.1.2 分類
- 以水與空氣接觸之形式,可分為:⒜濕式冷卻塔(Wet cooling tower)-水和空氣直接接觸,熱能、質能同時交換進行的冷卻塔。⒝乾式冷卻塔(dry cooling tower)-水和空氣不直接接觸,只有熱交換的冷卻塔。⒞乾-濕式冷卻塔(dry-wet cooling tower)-由乾式、濕式兩部分組成的冷卻塔。
- 以通風形式,可分為:⒜導引式機械通風冷卻塔(induced draft mechanical cooling tower)-將送風設置在冷卻塔進風口的冷卻塔。⒝強制通風式機械通風冷卻塔(forced draft mechanical cooling tower)-將送風設置在冷卻塔進風口處的冷卻塔。⒞自然通風冷卻塔(natural draft cooling tower)-藉由塔內外的空氣密度差或自然風力形成的空氣對流作用進行通風的冷卻塔。
2.2 PID控制
PID控制器是一個在工業控制應用中常見的反饋迴路部件。這個控制器把收集到的數據和一個參考值進行比較,然後把這個差別用於計算新的輸入值,這個新的輸入值的目的是可以讓系統的數據達到或者保持在參考值。PID控制器可以根據歷史數據和差別的出現率來調整輸入值,使系統更加準確而穩定。
基本上,PID控制是指釋出與當前值(PV)和設定值(SP)的偏差呈比例的輸出比例動作(Proportional Action:P動作)、釋出與該偏差積分呈比例的輸出(Integral Action:I動作)以及輸出與偏差微分呈比例的微分動作(Derivative Action:D動作)的和,以朝向目標值進行控制。
PID控制器(比例-積分-微分控制器),由比例單元(Proportional)、積分單元(Integral)和微分單元(Derivative)組成。可以透過調整這三個單元的增益來調定其特性。PID控制器主要適用於基本上線性,且動態特性不隨時間變化的系統,其PID演算法如 式1所示。[4]

其中,Kp=比例增益 ; Ki=積分增益 ; Kd=微分增益 ; e=誤差=設定值(SP)-回授值(PV) ; t=目前時間 ; τ=積分變數,數值從0到目前時間t。
2.2.1 P控制項
比例動作(P動作)是指在比例帶內,運作與當前值和設定值的偏差呈比例的操作量動作。
比例控制考慮當前誤差,誤差值和一個正值的常數Kp(表示比例)相乘。Kp只是在控制器的輸出和系統的誤差成比例的時候成立。比如說,一個電熱器控制器是在目標溫度和實際溫度差10°C時有100%的輸出,而其目標值是25°C。那麼它在15°C的時候會輸出100%,在20°C的時候會輸出50%,在24°C的時候輸出10%,注意在誤差是0的時候,控制器的輸出也是0。
若比例增益大,在相同誤差量下,會有較大的輸出,但若比例增益太大,會使系統不穩定。相反的,若比例增益小,若在相同誤差量下,其輸出較小,因此控制器會較不敏感的。若比例增益太小,當有干擾出現時,其控制信號可能不夠大,無法修正干擾的影響。
2.2.2 I控制項
積分動作(I動作),適當出現穩態誤差時改變操作量,做出等同手動重整一般消弭穩態誤差的動作。
積分控制考慮過去誤差,將誤差值過去一段時間和(誤差和)乘以一個正值的常數Ki。Ki從過去的平均誤差值來找到系統的輸出結果和預定值的平均誤差。一個簡單的比例系統會震盪,會在預定值的附近來回變化,因為系統無法消除多餘的糾正。通過加上負的平均誤差值,平均系統誤差值就會漸漸減少。所以,最終這個PID迴路系統會在設定值穩定下來。積分控制考慮過去誤差,將誤差值過去一段時間和(誤差和)乘以一個正值的常數Ki。
Ki從過去的平均誤差值來找到系統的輸出結果和預定值的平均誤差。一個簡單的比例系統會震盪,會在預定值的附近來回變化,因為系統無法消除多餘的糾正。通過加上負的平均誤差值,平均系統誤差值就會漸漸減少。所以,最終這個PID迴路系統會在設定值穩定下來。
2.2.3 D控制項
微分動作(D動作)是指因檢測溫度開始改變時,視該變化程度,趁偏差較小的時候,施加大幅修正動作,以防止結果發生極大波動的一種動作。
微分控制考慮將來誤差,計算誤差的一階導,並和一個正值的常數Kd相乘。這個導數的控制會對系統的改變作出反應。導數的結果越大,那麼控制系統就對輸出結果作出更快速的反應。這個Kd參數也是PID被稱為可預測的控制器的原因。Kd參數對減少控制器短期的改變很有幫助。一些實際中的速度緩慢的系統可以不需要Kd參數。
微分控制可以提昇整定時間及系統穩定性。不過因為純微分器不是因果系統,因此在PID系統實現時,一般會為微分控制加上一個低通濾波器以限制高頻增益及雜訊。實際上較少用到微分控制,估計PID控制器中只有約20%有用到微分控制。[5]
2.2.4 串級PID控制器
二個PID控制器可以組合在一起,得到較佳的效果,這稱為串級PID控制。以兩個PID控制器組成的串級PID控制為例,其中一個PID控制器在外迴路,控制像液面高度或是速度等主要的物理量,另一個PID控制器是內迴路,以外迴路PID控制器的輸出做為其目標值,一般是控制較快速變化的參數,例如流量或加速度等。若利用串級PID控制,可以增加控制器的工作頻率,並降低其時間常數。
例如一個溫控的循環水浴設備有二個串級的PID控制器,分別有各自的熱電偶溫度感測器。外迴路的控制器控制水溫,其感測器距加熱器很遠,直接量測整體水溫,其誤差量是理想水溫及整體水溫的差值。外迴路PID控制器的輸出即為內迴路控制器的目標值,內迴路控制器控制加熱器,其感測器是在加熱器上,其誤差量是加熱器的理想溫度及量測到溫度的差值,其輸出會使加熱器維持在設定值附近。
內外迴路控制器的參數可能會差很多,外迴路的PID控制器有較長的時間常數,對應所有的水加熱或是冷卻需要的時間。內迴路的PID控制器反應會比較快。每個控制器可以調整到符合其真正控制的系統,例如水槽中所有的水,或是加熱器本身。[4]
2.3 馬達變頻控制
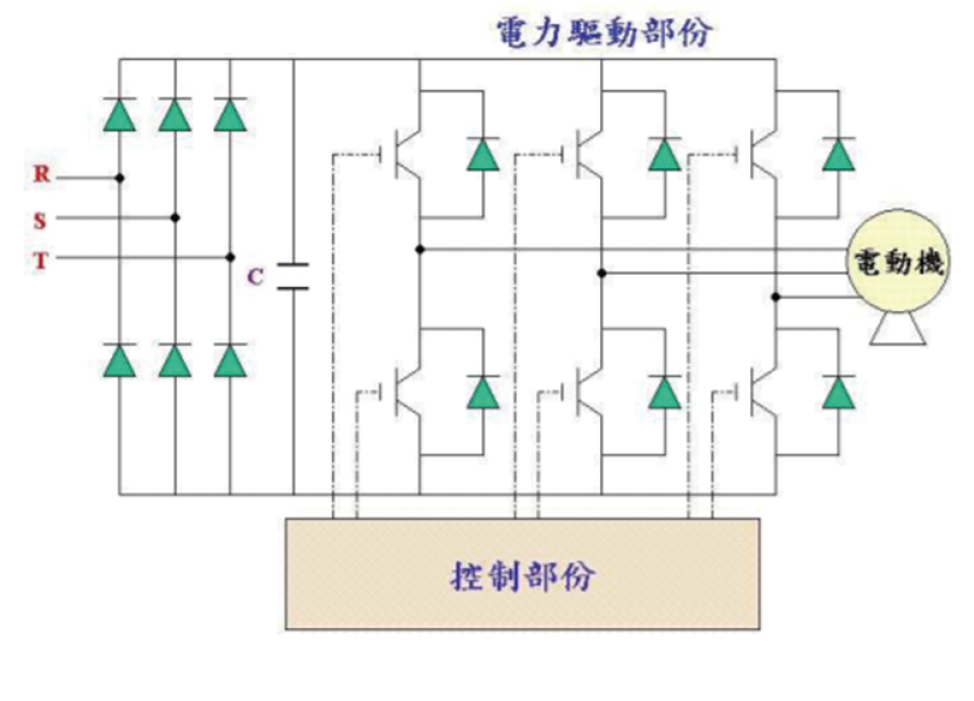
變頻器主要可分成二部分,控制部份及電力驅動部份,如 圖3之變頻器電路架構。電力的轉換方式是先將三相電源經整流後形成直流電壓跨於主電路電容器上,再藉控制部送出的六個閘極控制訊號,將直流電壓切割成三相脈波寬度調變的電壓送給電動機,因電動機線圈的電感效應,充放電形成連續鋸齒波形的三相正弦波電流波形,使電動機能平滑的運轉。
圖3、變頻器電路架構[6]
2.3.1 變頻器的型式
由於電路結構的不同,一般所使用的變頻器大概有以下三種型式 :
① 可變電壓源變頻器(Variable Voltage Input)
其輸出相電壓波型為六階型態,故又稱為六階VVI。當速度變化時,其輸出電壓及頻率亦跟著變化,此電壓變化乃是藉著DC電壓的高低來達到維持頻率變化的需求。
② 電流源變頻器(Current Source Input)
其輸出電壓及頻率的大小是利用電流源來控制的。
③ 脈波寬度調變變頻器(Pulse Width Modulation)
其本質上亦為電壓源變頻器,利用高速切換變頻器的導通率來控制輸出電壓的變化,其調變方式有方波調變和正弦波調變二種,圖4即以方波調變來說明。Vd為輸入電壓,Vo為輸出電壓,可藉由調整Vd、S.W開關時間及電阻值大小來改變輸出電壓(Vo),而其輸出電壓平均值即為Vo=Ton*Vd/Ts。其中,Vo=輸出電壓;Vd=輸入電壓;Ton=S.W on的時間;Ts=週期。
圖4、2018春(2018.02.13~15)
2.3.2 變頻器的優點
使用變頻器控制轉速不僅可以節省部分負載電力外,又有下以列優點:
- 由於馬達、風扇在較低轉速運轉,因此所產生的機械噪音較低。
- 因變頻器具有緩啟動(Soft Start)功能,所以會降低瞬間啟動轉矩。
- 由於馬達運轉在低轉速,其軸承壽命較長。
- 系統控制較傳統(on-off)穩定。
2.3.3 變頻器的節能效益
電動機耗電量與轉速三次方成正比,視負載狀況降低其轉速可有效降低其耗電量。而依據泵浦相似定律(Pump Affinity Laws)得知水量與轉速成正比,因此,馬達耗電量與流量三次方成正比。[6]
3. 研究方法
3.1 季節、日夜更迭造成之蒸發量調查
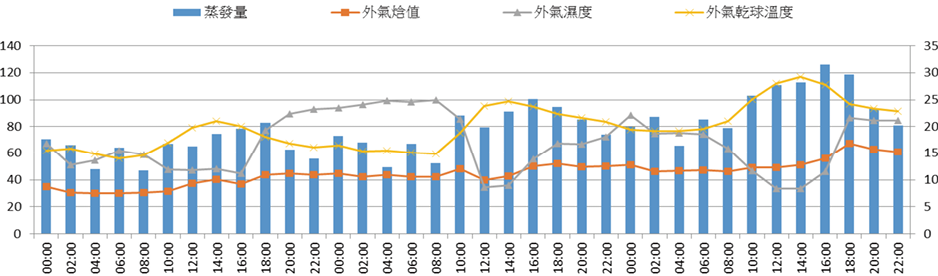
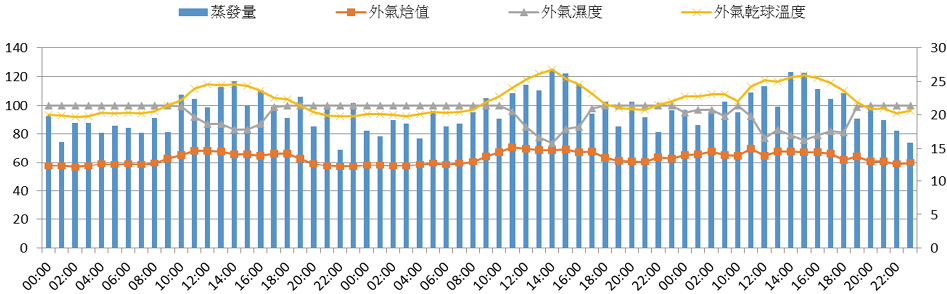
調閱中央氣象局2018各季之氣象資料,挑選各季節最具代表性之日期:春、秋-日夜溫差最大;夏-外氣乾球溫度最高;冬-外氣乾球溫度最低,結果如 圖4~圖7所示,各季節外氣乾球溫度範圍/蒸發量約為:春-15~29℃/40~120CMH;夏-27~32℃/100~160CMH;秋-19~27℃/65~138CMH;冬-19~25℃/65~120CMH。
圖5、2018夏(2018.07.23~25)
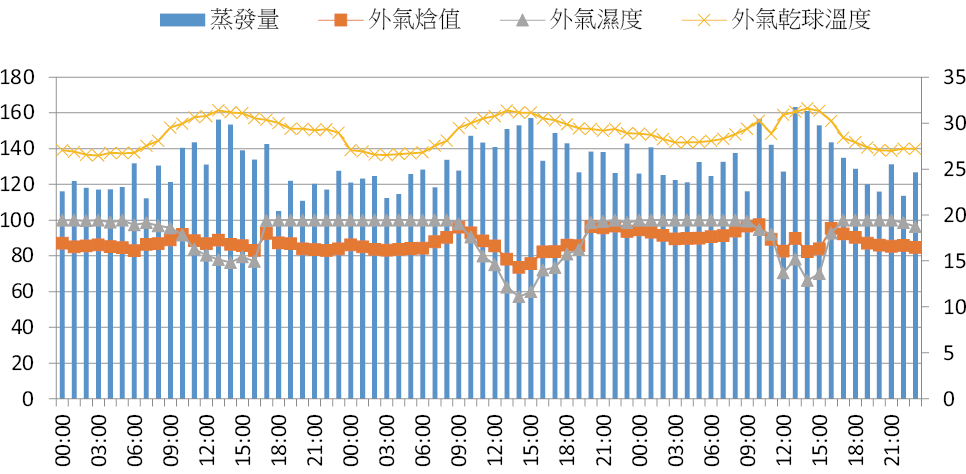
圖6、2018秋(2018.10.29~31)
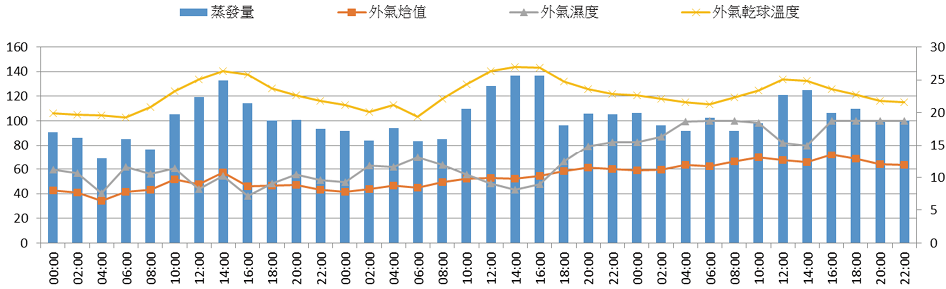
圖7、2018冬(2019.01.11~13)
3.2 冷卻水塔液位PID控制最佳化方法
3.2.1 原控制系統
F14P6冷卻水塔控制系統SCADA(Supervisory Control And Data Acquisition,資料採集與監視系統)畫面如 圖8所示,由RCW Tank(回收水槽)、Cooling tower pump(後文簡稱Pump,冷卻水供水泵)、Cooling tower water basin(後文簡稱Basin,冷卻水塔水槽)、Blowdown Valve(排放水閥)所組成。
圖8、F14P6冷卻水塔控制系統SCADA畫面(修改前)
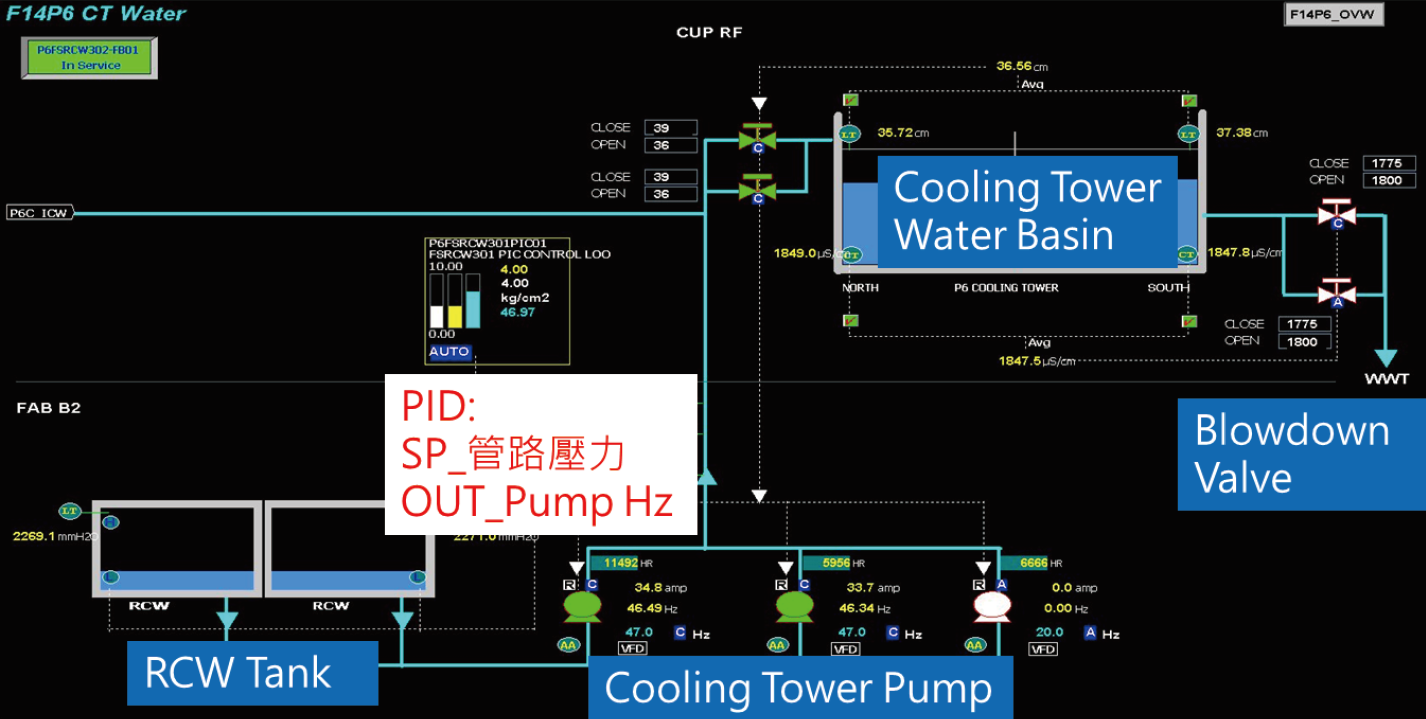
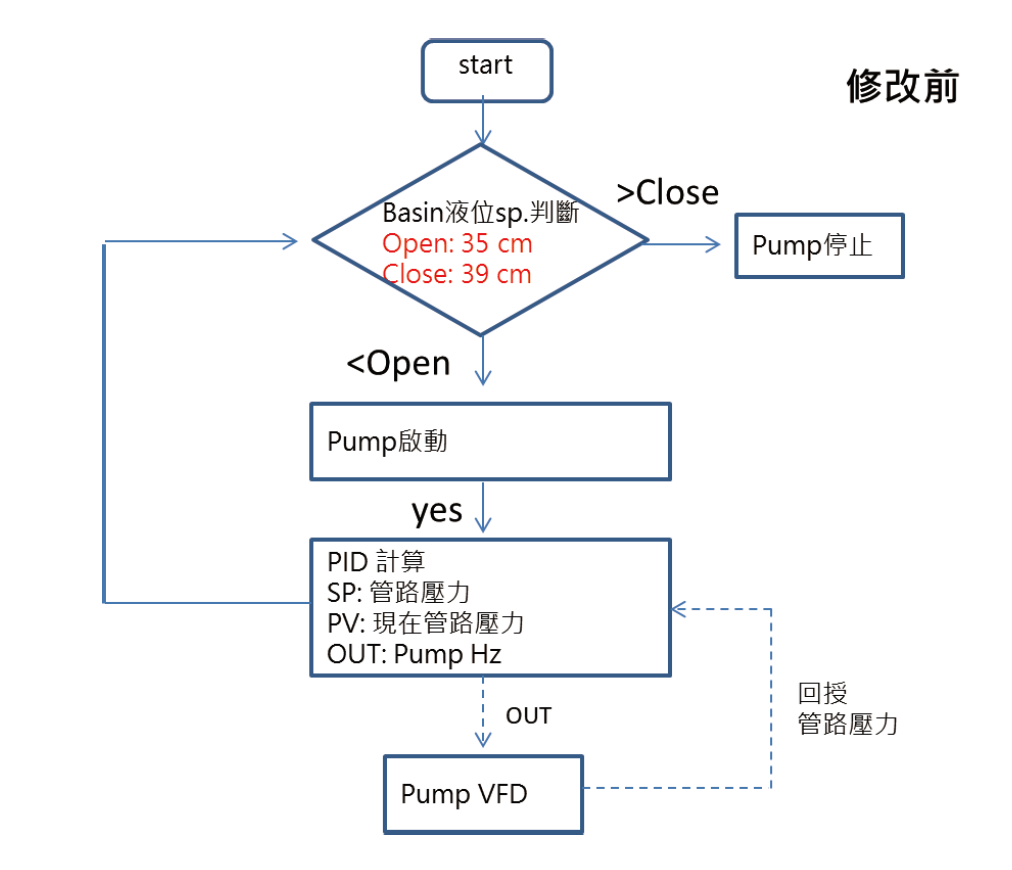
原控制系統邏輯如 圖9所示。說明如下:原控制系統為單一PID設定,DCS Controller抓取Basin液位,並由液位設定點觸發Pump之啟動、停止,PID設定值(SP)為管路壓力,當Basin液位低於啟動點時Pump啟動,以當下管路壓力(PV)與SP值比較,輸出Pump運轉之Hz(OUT)給變頻器,Hz數上升造成之管路壓力值回授至PID,使其追載至設定之管路壓力值(SP),當Basin液位高於啟動點時Pump停止。由於管路壓力值(SP)為定值,Pump出口追載結果皆為固定流量(為避免水量不足,設計值~200CMH>RCW回收系統平均進水量150CMH)。
圖9、F14P6冷卻水塔控制系統邏輯圖(修改前)
3.2.2 系統控制模式修改
修改後之控制模式SCADA畫面如 圖10所示,邏輯圖如 圖11所示。說明如下:修改後之控制模式導入串級PID控制,第一級PID設定值為Basin液位目標值(SP值),輸入值為當下Basin液位(PV值),輸出值為管路壓力設定值至第二級PID,第二級PID SP為原有之管路壓力,輸出為Pump Hz數,如此,Pump Hz便會隨當下Basin液位與液位目標值之差異進行追減載。導入串級PID控制後,需要設定第一級PID Basin液位目標值,使得液位設定點可隨著蒸發量與RCW液位而變化,其功能設定點如 圖12所示。
圖10、F14P6冷卻水塔控制系統SCADA畫面(修改後)
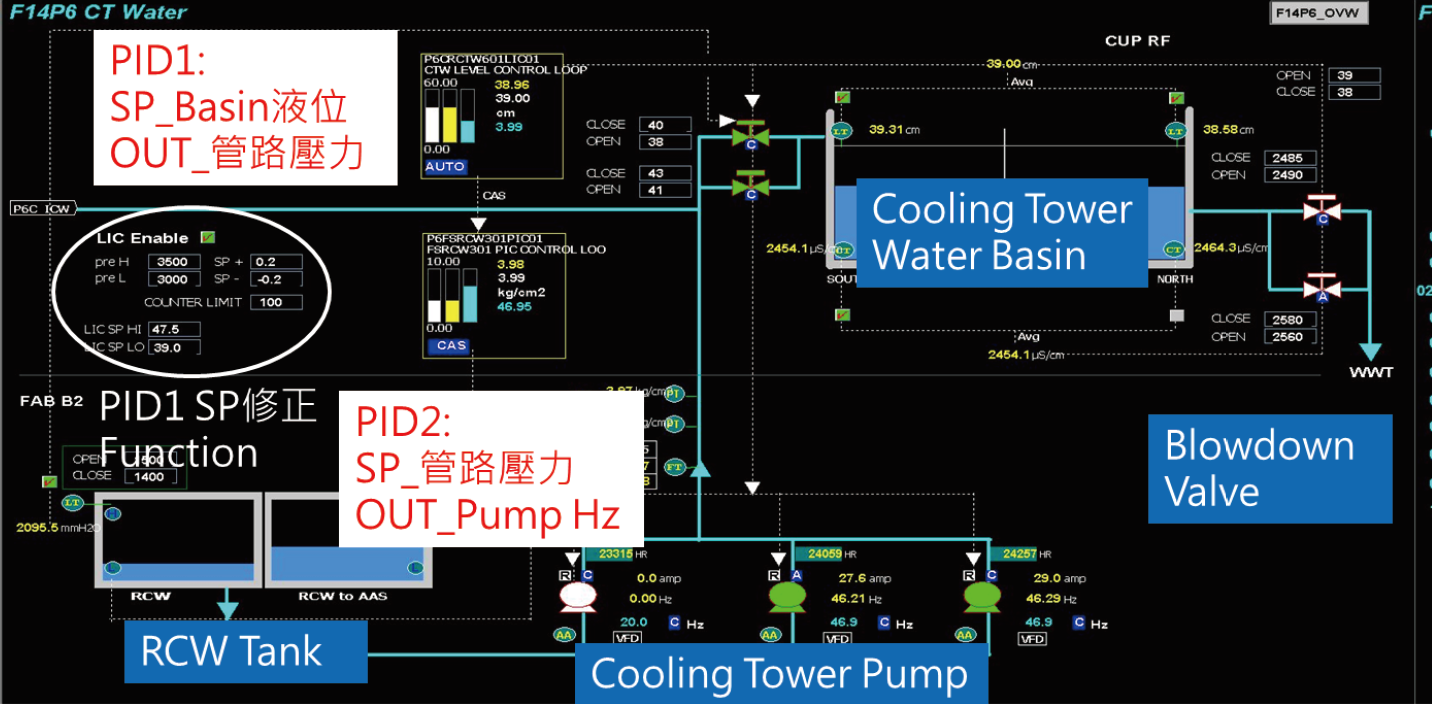
圖11、F14P6冷卻水塔控制系統邏輯圖(修改後)
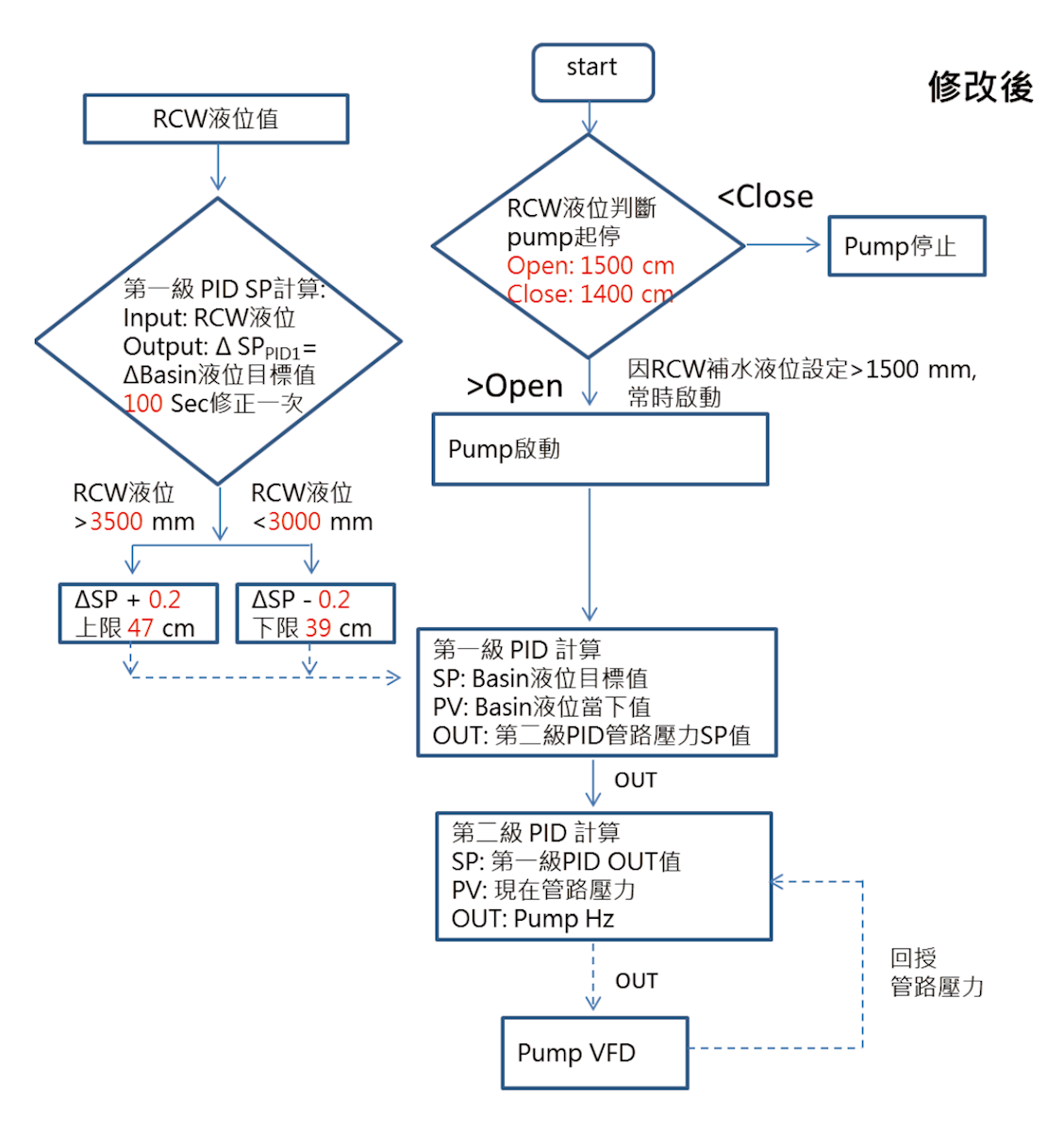
圖12、第一級PID Basin液位目標值設定點

設定之考量點有二:①系統穩定運轉 : 因Basin液位過低可能因渦流而吸入空氣,因此需設定下限值為現場確認後之安全值(LIC SP LO)39cm;另外,設定Basin之Overflow管位置47cm處為上限,避免補過多水至Basin仍導致Overflow浪費水與Pump能源。②RCW液位控制 : 設定RCW液位上下限,當RCW液位超過上限(preH)時,Basin液位目標值上修(SP+)0.2cm,如液位持續超過上限值超過時間設定值(Counter Limit)100sec,則再上修0.2cm,以此類推;RCW液位低於下限值(preL)時則下修(SP-)Basin液位目標值0.2cm,也以此類推。
如此,當夜間蒸發量下降時,Basin液位持續在高點,PV值≧SP值,第一級PID之壓力SP輸出值下降,控制第二級PID輸出之Pump VFD Hz數也隨之下降,故Pump出口流量降低,RCW液位上升。當RCW液位超過上限值時,Basin液位SP值上修0.2cm,此時PV值<SP值,第一級PID之壓力輸出值上升,控制第二級PID輸出之pump VFD Hz數也隨之上升,故Pump出口流量上升,若流量仍<150CMH,RCW液位持續上升,Basin液位SP值持續上修,Pump出口流量持續上升,直到流量>150CMH後RCW液位開始下降至低於設定點,Basin液位SP值開始微幅下修,達到Pump出口流量與RCW入水量漸漸平衡符合當下環境蒸發量之結果。
3.3 PID控制參數最佳化
3.3.1 Ziegler-Nichols方法
最常見的控制器調整方法是Ziegler-Nichols和Cohen-Coon法。當系統的數學模型不可用時,通常使用這些方法。Ziegler-Nichols法可用於閉迴路和開放式迴路系統,而 Cohen-Coon通常用於開放式迴路系統。 閉迴路控制系統是使用反饋控制的系統,會將輸出值與輸入值進行比較,而在開放式迴路系統中則不會將輸出值與輸入值進行比較。因本研究之冷卻水塔液位控制屬串級之閉迴路控制系統,故選用Ziegler-Nichols法進行研究。
Ziegler-Nichols法之調試方式為,首先將積分和微分增益設置為0,然後比例增益從零開始逐漸增加,直到到達極限增益Kmax,此時控制器輸出值以恆定值振盪。Kmax和振盪頻率f0根據不同的類型,按下表中的方式來設置比例、積分和微分增益,如 表1所示。
表1、Ziegler-Nichols PID控制參數調整方法[7]
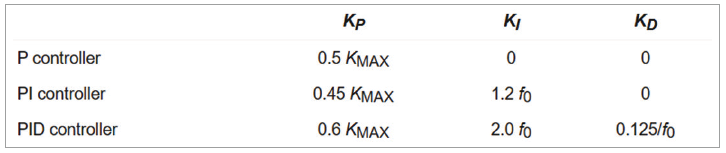
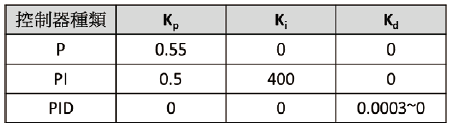
依照Ziegler-Nichols方法將第一級PID之I、D值設為0,藉由調整P值找出冷卻水塔液位維持穩定震盪之Kmax值後,調整I、D值如 表2所示,其中Kmax=1.1;f0=333.33,因Kd~0,因此第一級PID僅使用PI控制器。
表2、第一級PID(SP : 液位,Out : 壓力)Ziegler-Nichols方法結果
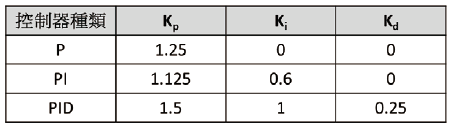
接著以Ziegler-Nichols方法將第二級PID之I、D值設為0,藉由調整P值找出冷卻水塔液位維持穩定震盪之Kmax值後調整I、D值如 表3所示,其中Kmax=2.5;f0=0.5。
表3、第二級PID(SP : 壓力,Out : Hz數)Ziegler-Nichols方法結果
4. 結果分析
4.1 節水效益
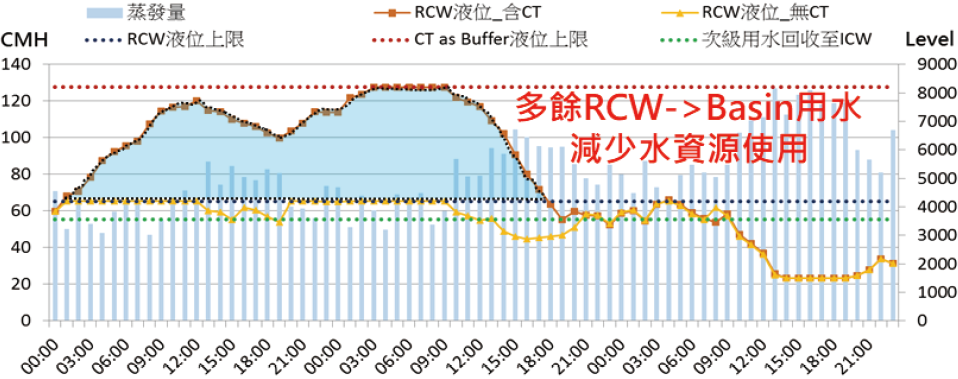
以程式修改前後狀況模擬2018.02.13~15(春)日夜溫差[8]最大(~12.8℃)之情況如 圖13所示,以Basin作為Buffer平均可減少~222CMD Overflow,~80CMD ICW用量,換算每年春、秋季可節省ICW用量與廢水排放量共14,400m3/年。
圖13、模擬程式修改前後2018.02.13~15冷卻水塔Basin之用水情況
4.2 節能效益
控制系統修改前,因僅有一段PID控制(PID2,SP : 管路壓力,OUT : Pump Hz),當單台Pump Hz>45Hz時,程式設計即會開啟第二台pump(Add In)運轉,又因VFD Hz只考慮管路壓力(SP為定值=4),因此無論當下蒸發量大小皆會啟動第二台Pump,造成能耗增加。
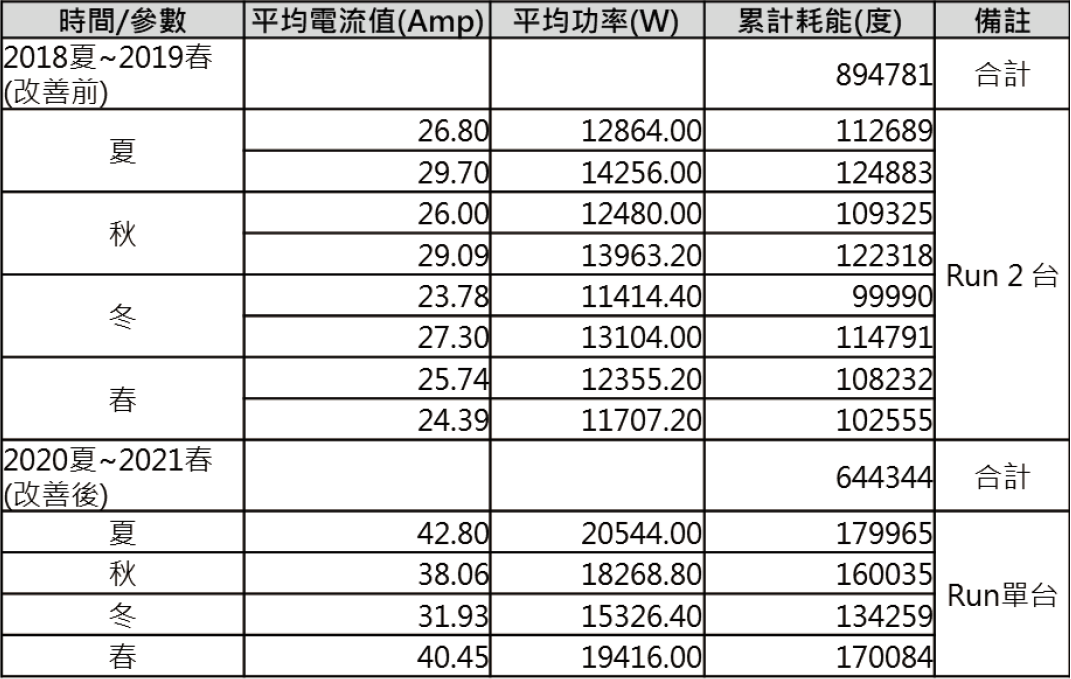
控制系統修改導入串級PID控制後,因已將液位(蒸發量)作為PID1之參數,輸出壓力SP值給PID2控制Pump Hz,故pump Add In條件即加入當下蒸發量狀態之考量,當蒸發量小時僅啟動單台Pump,蒸發量大時才啟動第二台pump避免補水不及,並進一步修改Add In條件為Pump Hz>55Hz(蒸發量過大導致Basin液位無法維持>SP)。測試結果如 表4所示,因修改控制系統為設定液位持續補水後,藉單台Pump VFD持續追減載即可維持Basin液位,2020夏~2021春皆無啟動第二台pump之需求,故累計耗能相對2019夏~2020春降低250,438度(約28%)。
表4、控制系統改善前後之節能效益
4.3 操作模式改善
控制系統修改前,值班人員會為避免因日夜溫差蒸發量變化,造成之RCW tank overflow而執行多項手動操作,例如:ACF反洗、C/T排水導電度下修、開啟C/T排水閥等,既不符合自動化之目標,且易發生MO(Miss Operation),控制系統改善後,因RCW Tank多餘水量可送至Cooling tower Basin進行Buffer,因此除節水效益外,亦大幅減少值班人員手動操作Loading與MO可能性,冬季約降低3次/天,春、秋季約降低1次/天,平均約減少1.25次/天手動操作,全年約減少456次手動操作,如 表5所示。
表5、控制系統改善前後水量與手動操作問題同步改善

5. 結論與建議
因Cooling Tower蒸發量隨日夜溫差、降雨與否變化,造成RCW Tank液位起伏而可能有RCW液位過高導致Overflow或原本可被使用之RCW被強制逆洗排放或切至放流之浪費的問題,藉由冷卻水塔液位自動控制功能的修改可以同時達到節水與減少人為操作Loading的效益,目前F14B(P567)已同步完成修改,以F14P6為例節水部分每年約可節省ICW用量與廢水排放量共14,400m3/年;節能部分約降低250,438度/年(約28%);操作改善部分,減少值班人員手動操作Loading與MO可能性,全年約減少456次手動操作。
建議部分,因各廠之Pump Capacity與Basin大小不盡相同,又因地理環境造成蒸發量之差異,建議系統管理人員之程式上線前仍需要重複測試確認冷卻水塔液位不至降低,並於每季重複檢視參數設定以期達到安全之要求。
參考文獻
- 節能技術案例彙編-冷卻水塔效率提升,財團法人台灣綠色生產力基金會,2000。
- 純水系統概論_Ver3_20210104,台積廠務學院,2021。
- https://chemicalengineeringworld.com/cooling-tower-working-and-types/
- Azbil,PID控制,網址: https://tw.azbil.com/%E6%8E%A7%E5%88%B6%E5%85%83%E4%BB%B6/
- 資訊系統,維基百科,網址: https://zh.wikipedia.org/wiki/PID%E6%8E%A7%E5%88%B6%E5%99%A8
- 變頻器應用Q&A節能技術手冊,經濟部能源局,2006。
- George Ellis, Control System Design Guide, Elsevier Inc., 2012。
- 中央氣象局氣候監測資料,https://www.cwb.gov.tw/V8/C/C/Watch/index.html
留言(0)